Public Types |
| enum | slaveNum { TLE5012B_S0 = 0x0000
, TLE5012B_S1 = 0x2000
, TLE5012B_S2 = 0x4000
, TLE5012B_S3 = 0x6000
} |
| |
Public Member Functions |
| errorTypes | begin () |
| |
| errorTypes | begin (uint8_t csPin, slaveNum slave=TLE5012B_S0) |
| | begin method with default assignments for the SPI bus and the slave setting. Only the csPin is needed. More...
|
| |
| errorTypes | readActiveStatus (uint16_t &data) |
| | read register offset 0x01 More...
|
| |
Data Fields |
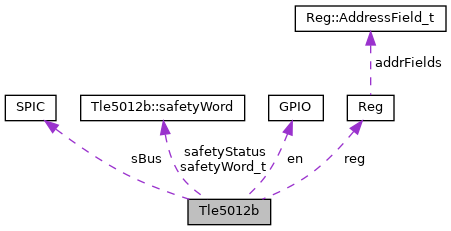
| SPIC * | sBus |
| | SPI cover class as representation of the SPI bus. More...
|
| |
| GPIO * | en |
| | shield enable GPIO to switch sensor2go on/off More...
|
| |
| Reg | reg |
| | Register map. More...
|
| |
| slaveNum | mSlave |
| | actual set slave number More...
|
| |
| struct Tle5012b::safetyWord | safetyWord_t |
| | constructor for the Sensor More...
|
| |
| safetyWord | safetyStatus |
| |
| uint16_t | safetyWord |
| | the last fetched safety word More...
|
| |
Protected Attributes |
| uint16_t | _command [2] |
| | command write data [0] = command [1] = data to write More...
|
| |
| uint16_t | _received [MAX_REGISTER_MEM] |
| | fetched data from sensor with last word = safety word More...
|
| |
| uint16_t | _registers [CRC_NUM_REGISTERS+1] |
| | keeps track of the values stored in the 8 _registers, for which the CRC is calculated More...
|
| |
TLE5012b.cpp - core library for the TLE5012B angle sensor. |
GMR-based angle sensor for angular position sensing in automotive applications Core Library
- Author
- Infineon Technologies AG
- Copyright
- 2019-2020 Infineon Technologies AG
- Version
- 3.1.0
SPDX-License-Identifier: MIT
|
| | Tle5012b () |
| | destructor stops the Sensor More...
|
| |
| | ~Tle5012b () |
| | default begin with standard pin setting More...
|
| |
| void | end () |
| |
| void | enableSensor () |
| |
| void | disableSensor () |
| |
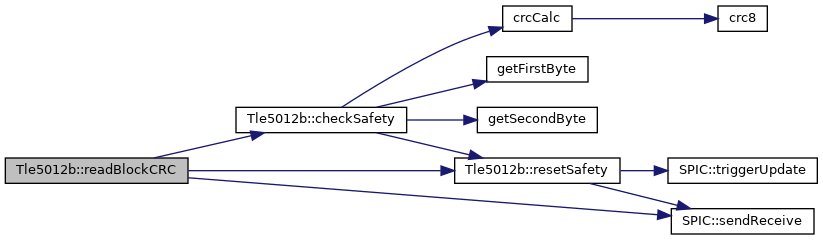
| errorTypes | readBlockCRC () |
| |
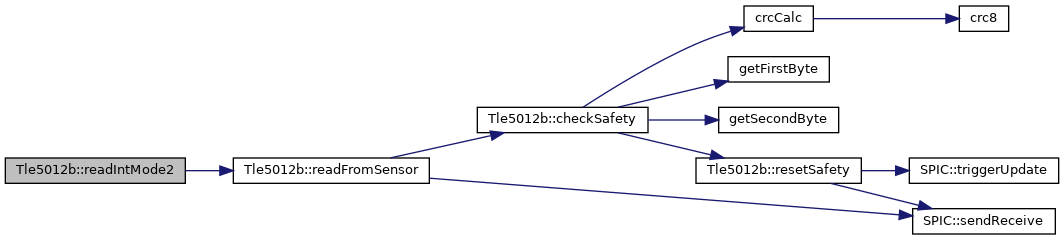
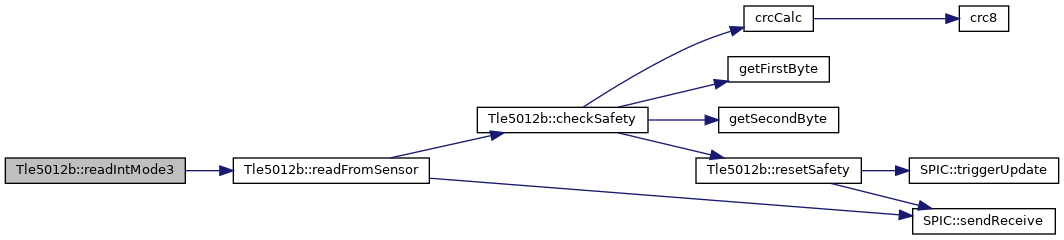
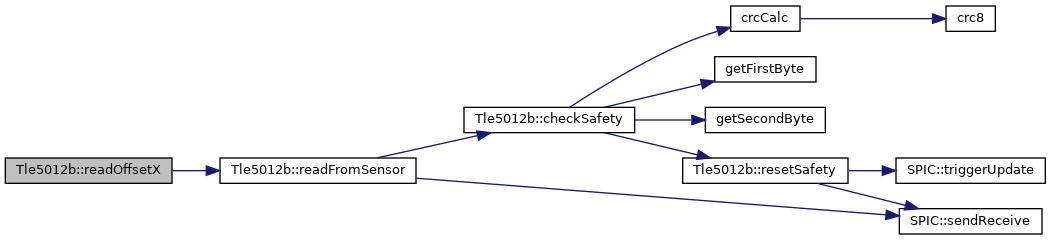
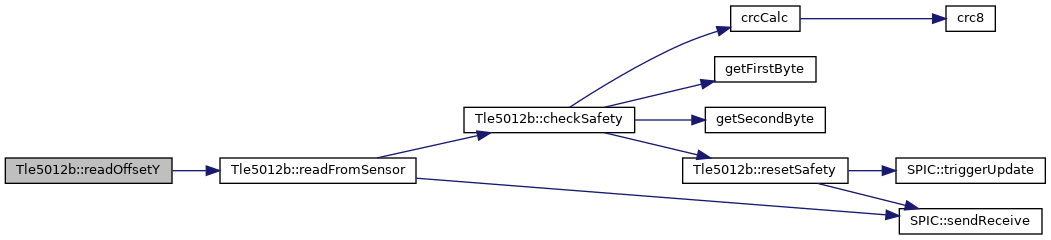
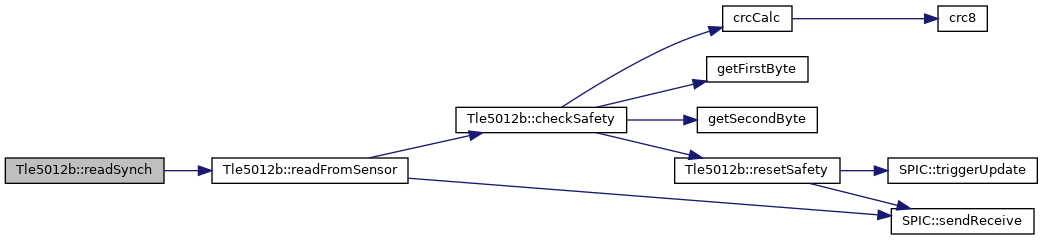
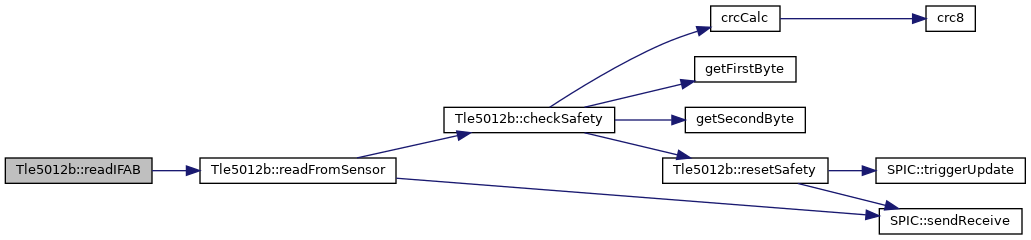
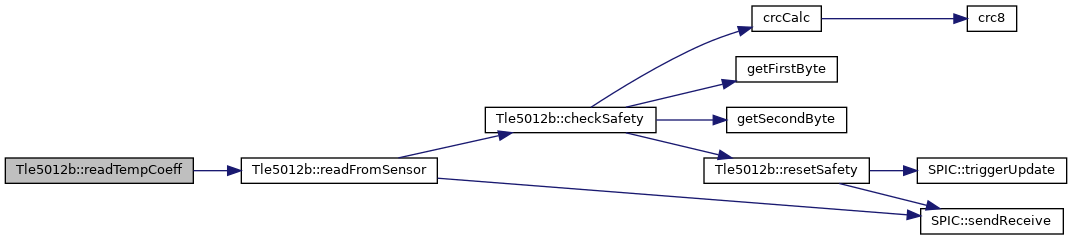
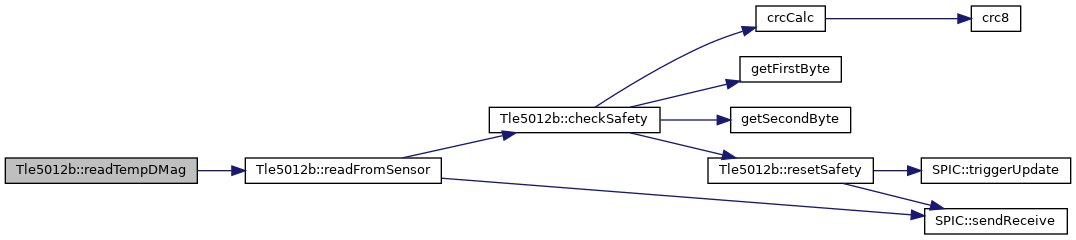
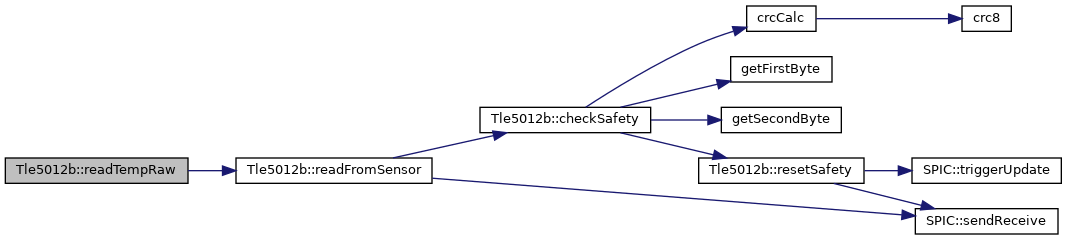
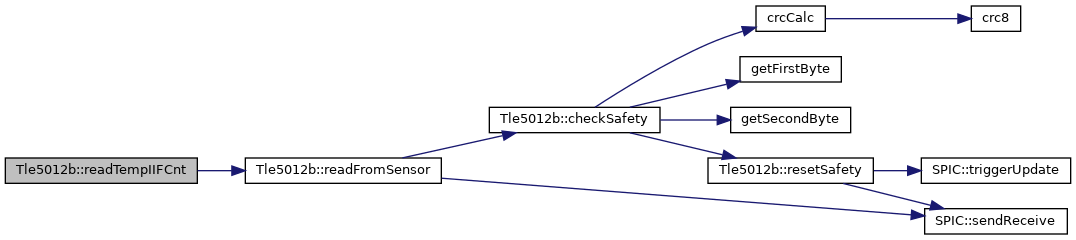
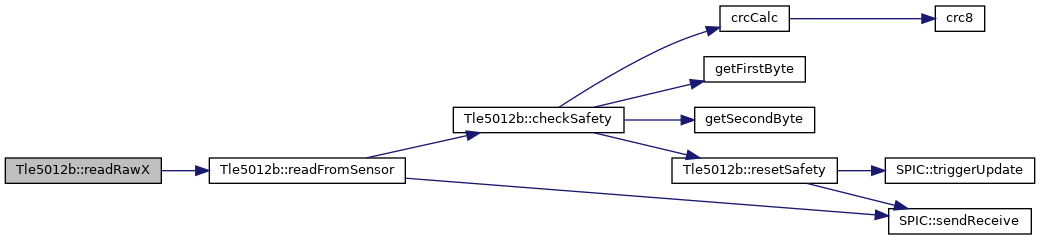
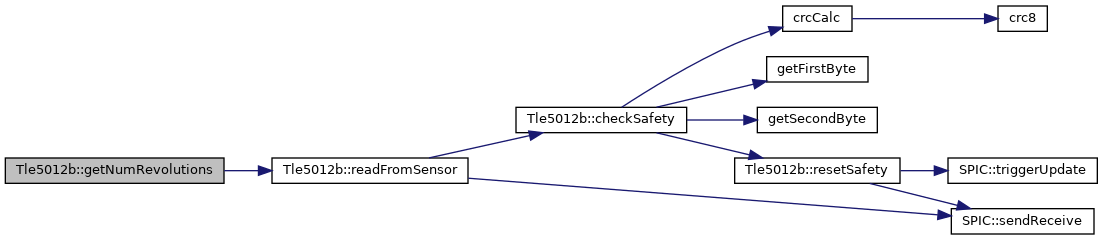
| errorTypes | readFromSensor (uint16_t command, uint16_t &data, updTypes upd=UPD_low, safetyTypes safe=SAFE_high) |
| |
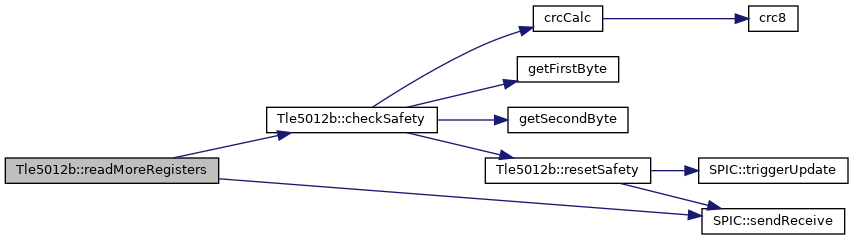
| errorTypes | readMoreRegisters (uint16_t command, uint16_t data[], updTypes upd=UPD_low, safetyTypes safe=SAFE_high) |
| |
| errorTypes | readStatus (uint16_t &data, updTypes upd=UPD_low, safetyTypes safe=SAFE_high) |
| |
| errorTypes | readActivationStatus (uint16_t &data, updTypes upd=UPD_low, safetyTypes safe=SAFE_high) |
| |
| errorTypes | readIntMode1 (uint16_t &data) |
| | read register offset 0x06 More...
|
| |
| errorTypes | readSIL (uint16_t &data) |
| | read register offset 0x07 More...
|
| |
| errorTypes | readIntMode2 (uint16_t &data) |
| | read register offset 0x08 More...
|
| |
| errorTypes | readIntMode3 (uint16_t &data) |
| | read register offset 0x09 More...
|
| |
| errorTypes | readOffsetX (uint16_t &data) |
| | read register offset 0x0A More...
|
| |
| errorTypes | readOffsetY (uint16_t &data) |
| | read register offset 0x0B More...
|
| |
| errorTypes | readSynch (uint16_t &data) |
| | read register offset 0x0C More...
|
| |
| errorTypes | readIFAB (uint16_t &data) |
| | read register offset 0x0D More...
|
| |
| errorTypes | readIntMode4 (uint16_t &data) |
| | read register offset 0x0E More...
|
| |
| errorTypes | readTempCoeff (uint16_t &data) |
| | read register offset 0x0F More...
|
| |
| errorTypes | readTempDMag (uint16_t &data) |
| | read register offset 0x14 More...
|
| |
| errorTypes | readTempRaw (uint16_t &data) |
| | read register offset 0x15 More...
|
| |
| errorTypes | readTempIIFCnt (uint16_t &data) |
| | read register offset 0x20 More...
|
| |
| errorTypes | readTempT25 (uint16_t &data) |
| | read register offset 0x30 More...
|
| |
| errorTypes | readRawX (int16_t &data) |
| |
| errorTypes | readRawY (int16_t &data) |
| |
| errorTypes | getAngleRange (double &angleRange) |
| |
| errorTypes | getAngleValue (double &angleValue) |
| |
| errorTypes | getAngleValue (double &angleValue, int16_t &rawAnglevalue, updTypes upd=UPD_low, safetyTypes safe=SAFE_high) |
| |
| errorTypes | getNumRevolutions (int16_t &numRev, updTypes upd=UPD_low, safetyTypes safe=SAFE_high) |
| |
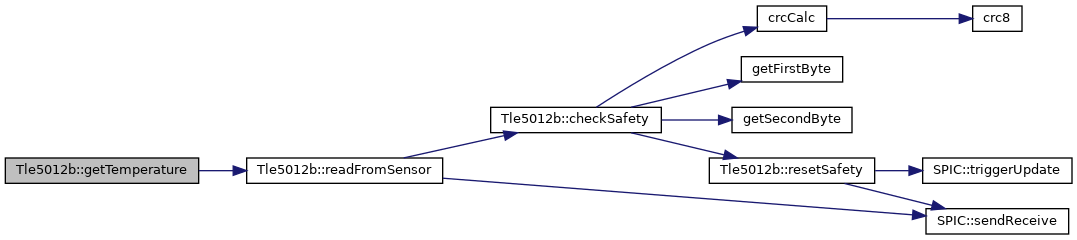
| errorTypes | getTemperature (double &temp) |
| |
| errorTypes | getTemperature (double &temp, int16_t &rawTemp, updTypes upd=UPD_low, safetyTypes safe=SAFE_high) |
| |
| errorTypes | getAngleSpeed (double &angleSpeed) |
| |
| errorTypes | getAngleSpeed (double &angleSpeed, int16_t &rawSpeed, updTypes upd=UPD_low, safetyTypes safe=SAFE_high) |
| |
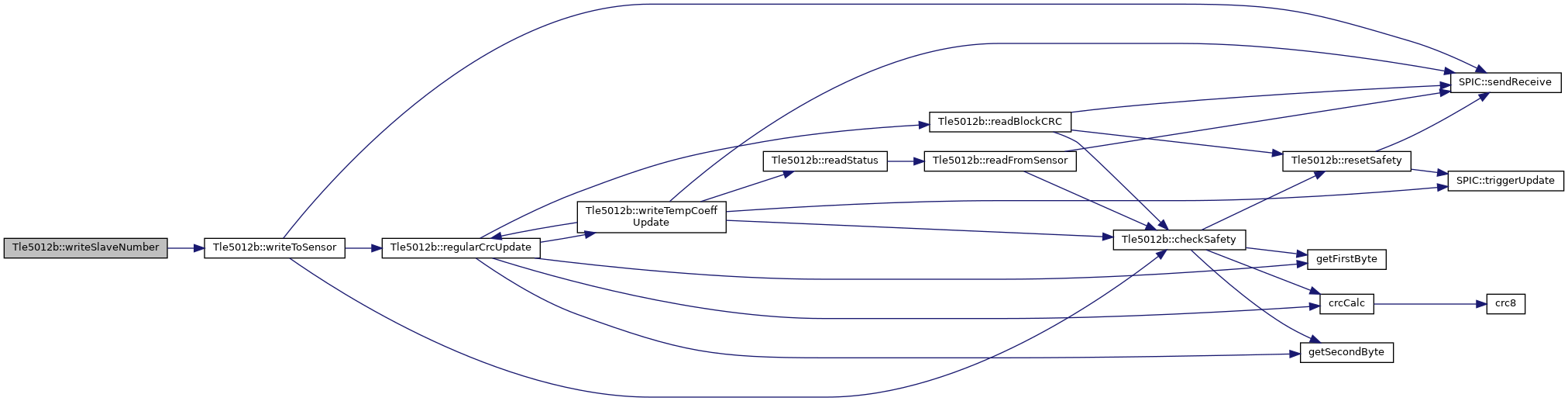
| errorTypes | writeSlaveNumber (uint16_t dataToWrite) |
| |
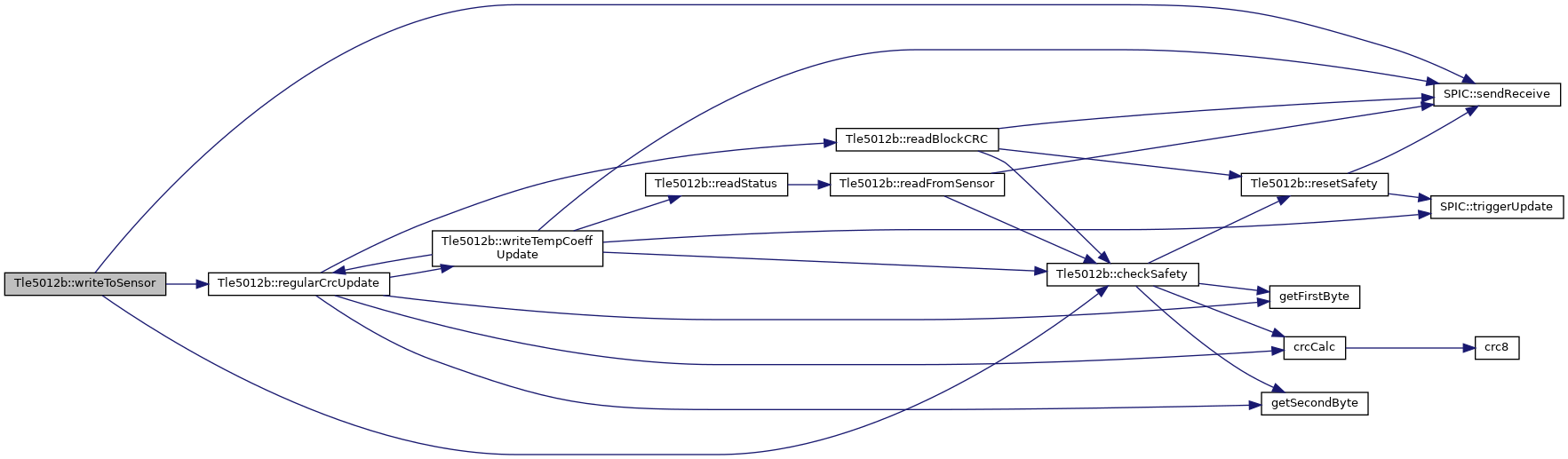
| errorTypes | writeToSensor (uint16_t command, uint16_t dataToWrite, bool changeCRC) |
| |
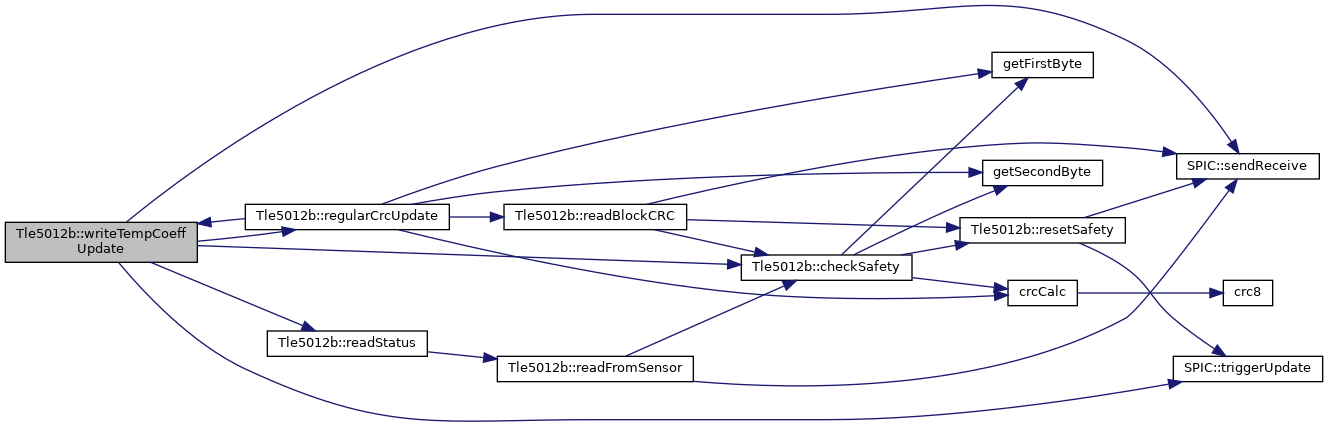
| errorTypes | writeTempCoeffUpdate (uint16_t dataToWrite) |
| |
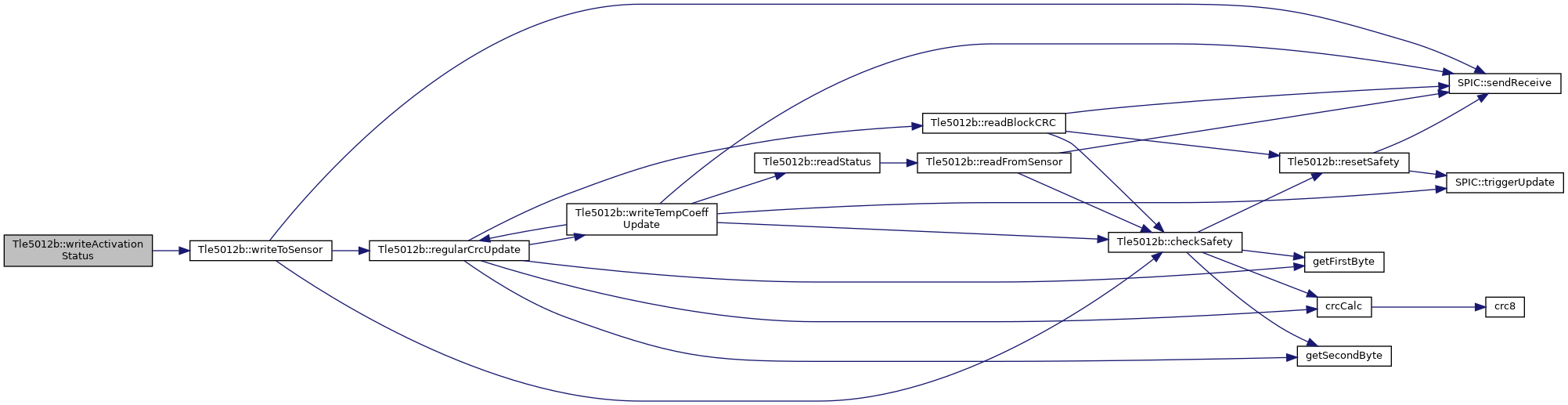
| errorTypes | writeActivationStatus (uint16_t dataToWrite) |
| | write register offset 0x01 More...
|
| |
| errorTypes | writeIntMode1 (uint16_t dataToWrite) |
| | write register offset 0x06 More...
|
| |
| errorTypes | writeSIL (uint16_t dataToWrite) |
| | write register offset 0x07 More...
|
| |
| errorTypes | writeIntMode2 (uint16_t dataToWrite) |
| | write register offset 0x08 More...
|
| |
| errorTypes | writeIntMode3 (uint16_t dataToWrite) |
| | write register offset 0x09 More...
|
| |
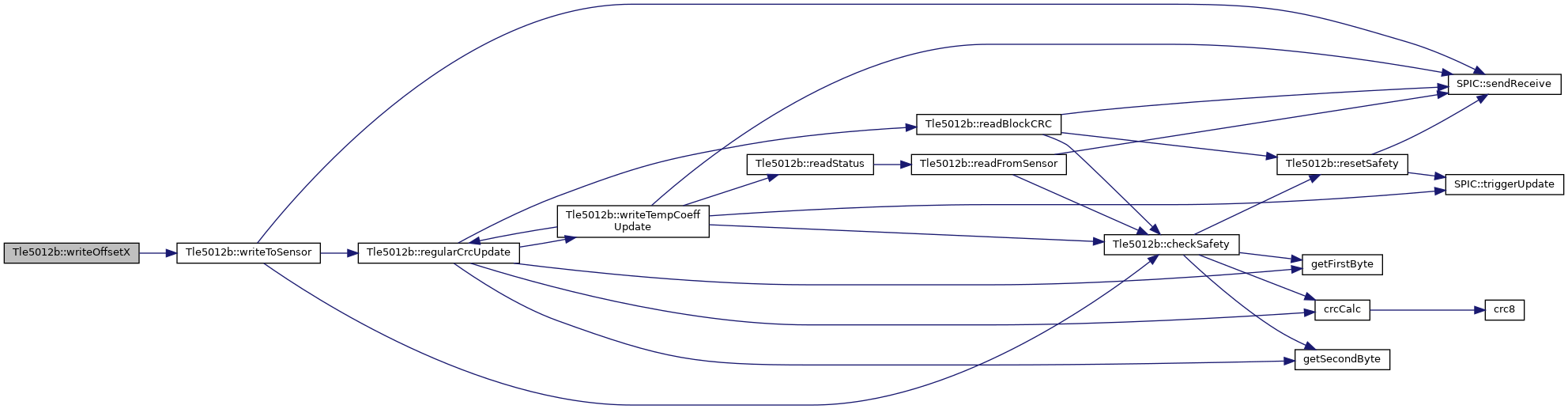
| errorTypes | writeOffsetX (uint16_t dataToWrite) |
| | write register offset 0x0A More...
|
| |
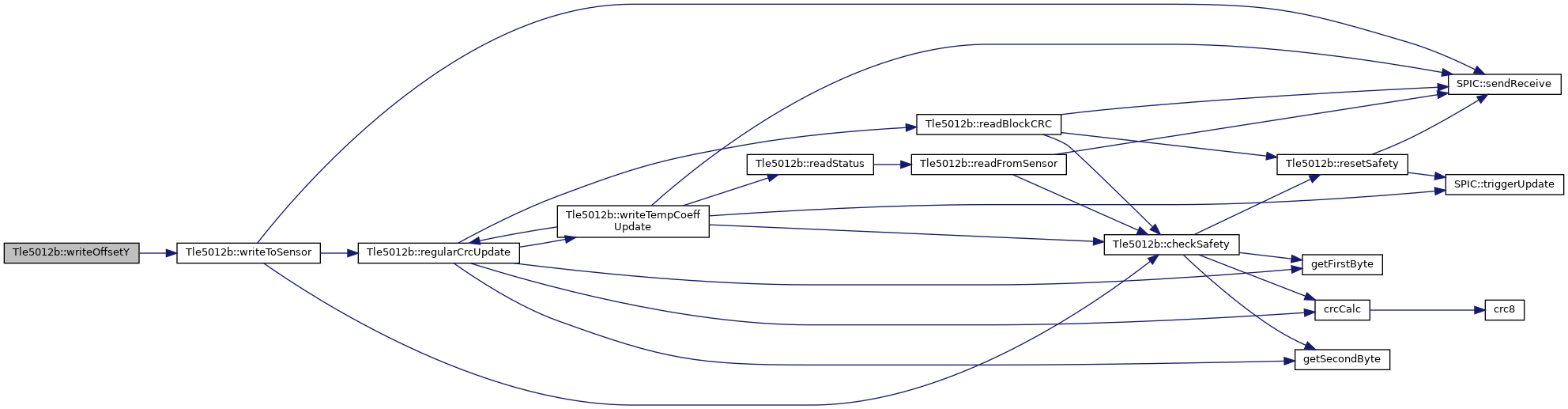
| errorTypes | writeOffsetY (uint16_t dataToWrite) |
| | write register offset 0x0B More...
|
| |
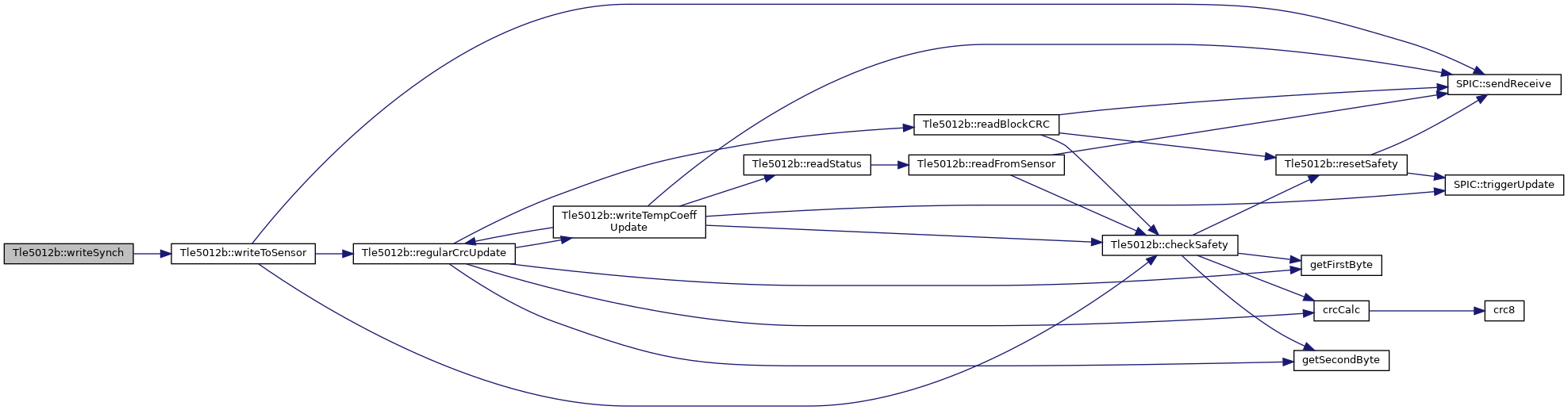
| errorTypes | writeSynch (uint16_t dataToWrite) |
| | write register offset 0x0C More...
|
| |
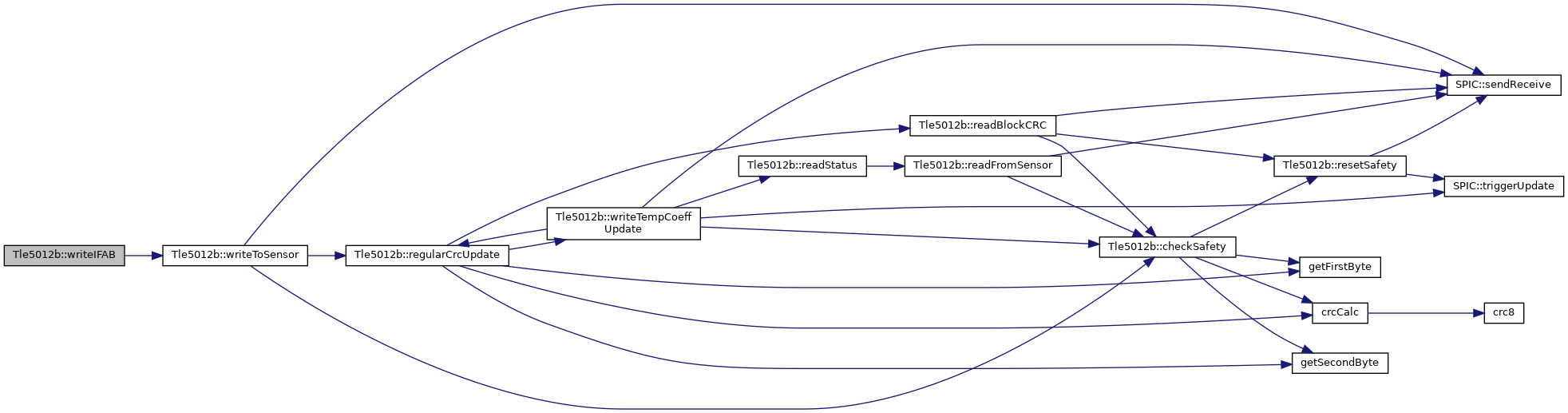
| errorTypes | writeIFAB (uint16_t dataToWrite) |
| | write register offset 0x0D More...
|
| |
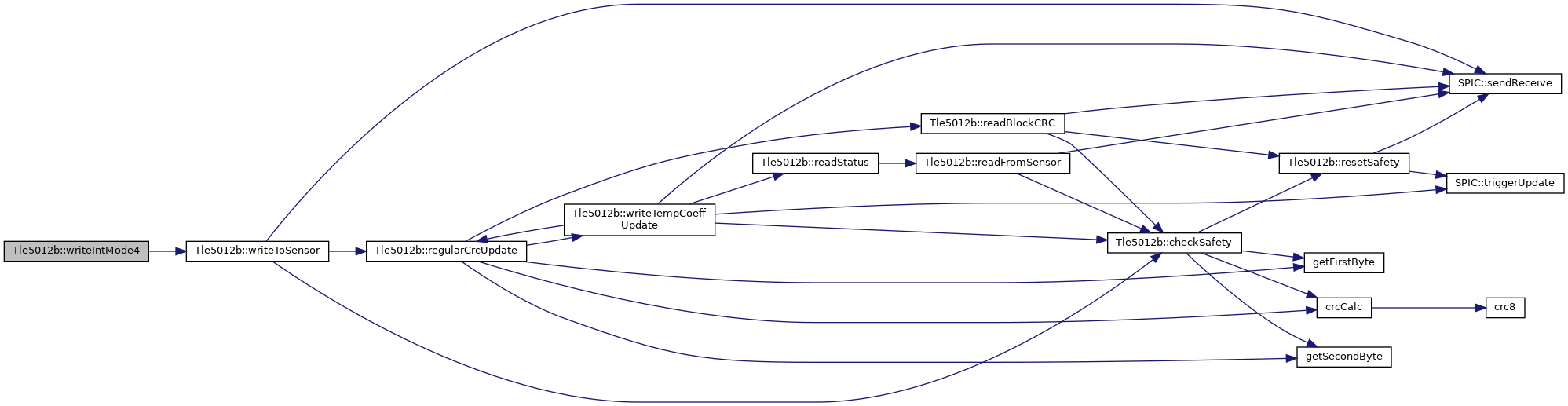
| errorTypes | writeIntMode4 (uint16_t dataToWrite) |
| | write register offset 0x0E More...
|
| |
| errorTypes | writeTempCoeff (uint16_t dataToWrite) |
| | write register offset 0x0F More...
|
| |
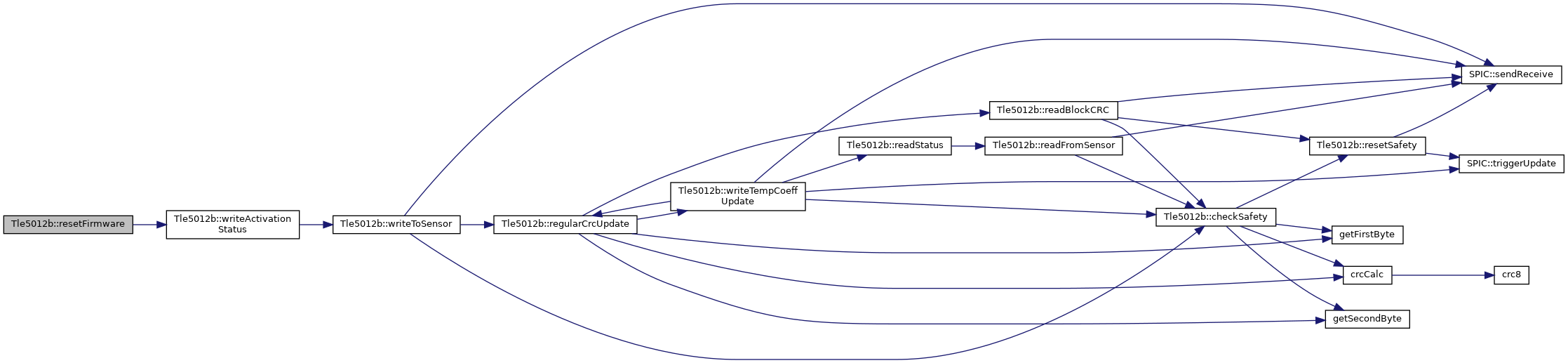
| errorTypes | resetFirmware () |
| |
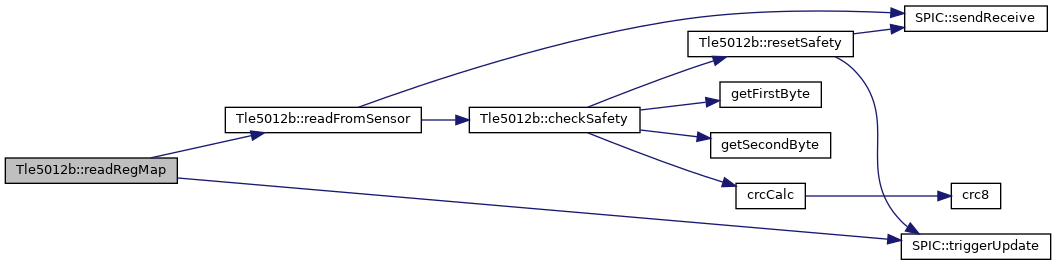
| errorTypes | readRegMap () |
| |
| errorTypes | writeInterfaceType (Reg::interfaceType_t iface) |
| |
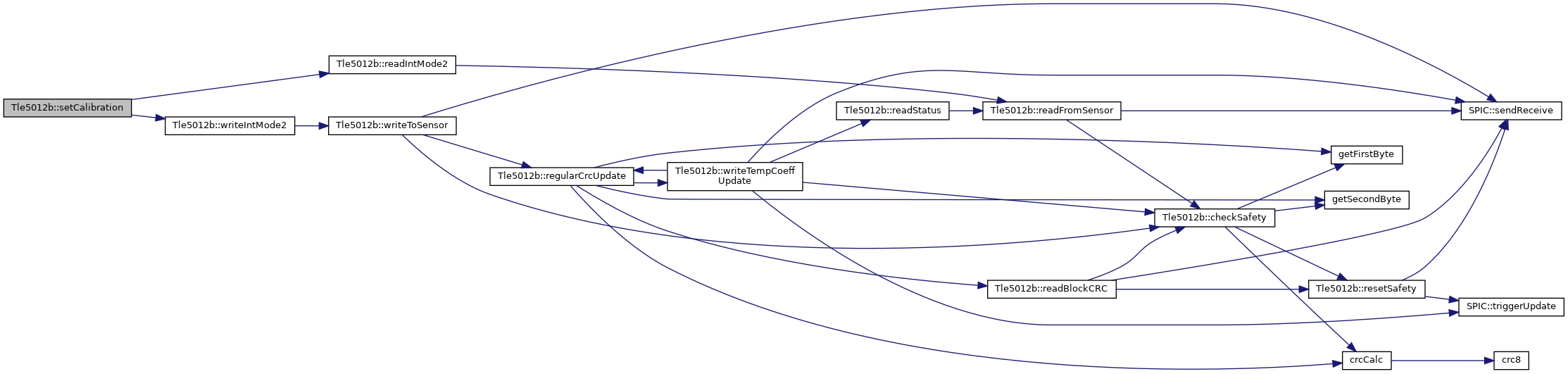
| errorTypes | setCalibration (Reg::calibrationMode_t calMode) |
| |
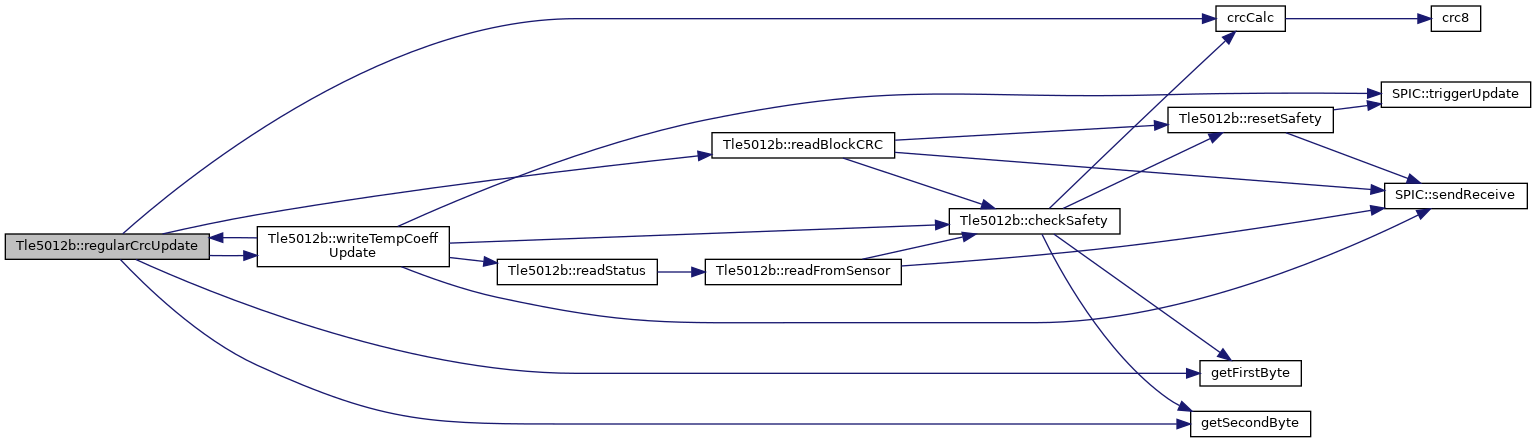
| errorTypes | regularCrcUpdate () |
| |
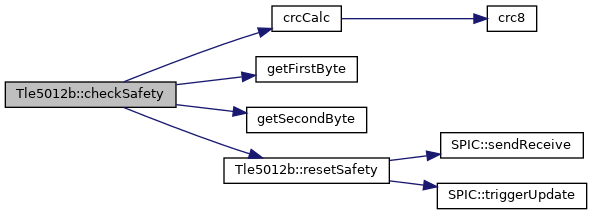
| errorTypes | checkSafety (uint16_t safety, uint16_t command, uint16_t *readreg, uint16_t length) |
| |
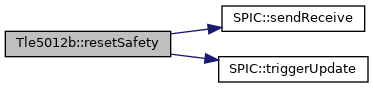
| void | resetSafety () |
| |