Demostrates how to read multiple registers
- Author
- Infineon Technologies AG
- Copyright
- 2020 Infineon Technologies AG
- Version
- 3.1.0
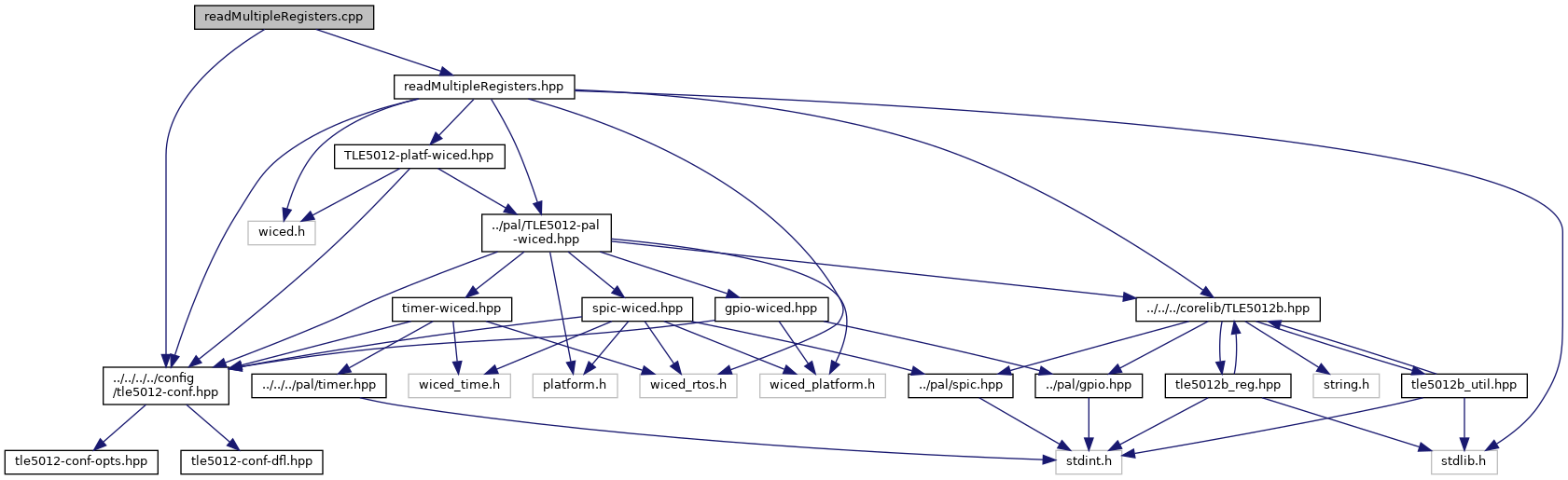
This example demonstrates how to read multiple raw registers at once. In this case you have to recalculate values like angle, angle speed etc. be your self.
the read command offset of 0x8000 will be set by the readMoreRegisters command so we need only the register offset from where we start and the second digit is how many consecutive registers to read which is be done by adding the length and the command values. A max of 15 value can read at once, one additional value is reserved for the safety bit.
SPDX-License-Identifier: MIT
|