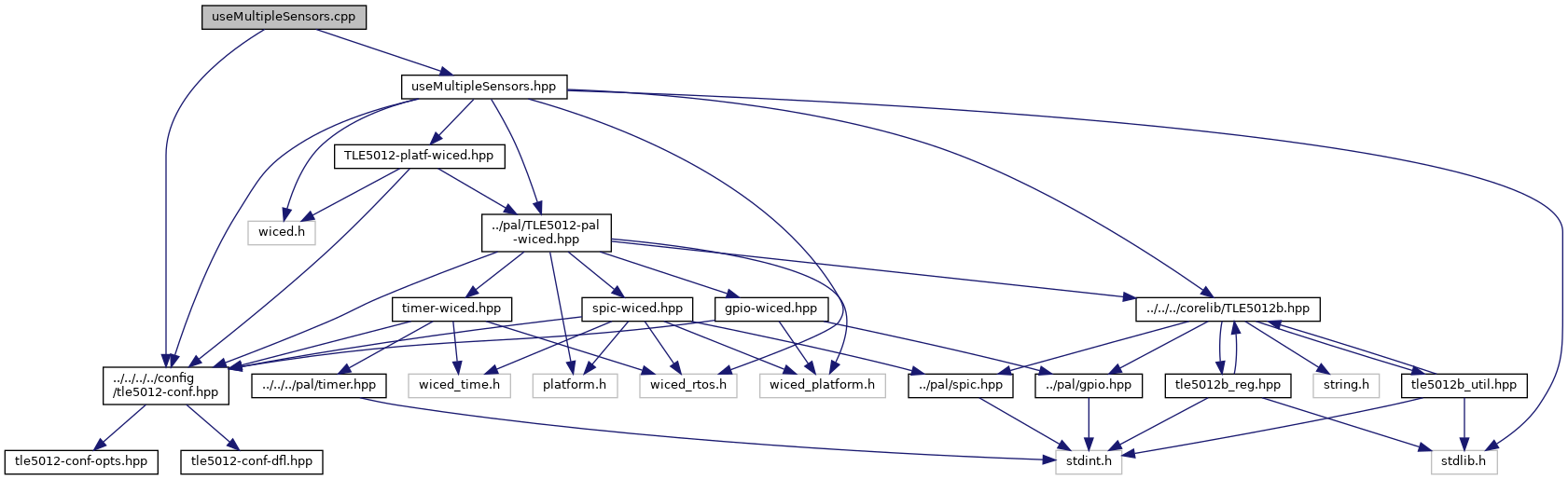
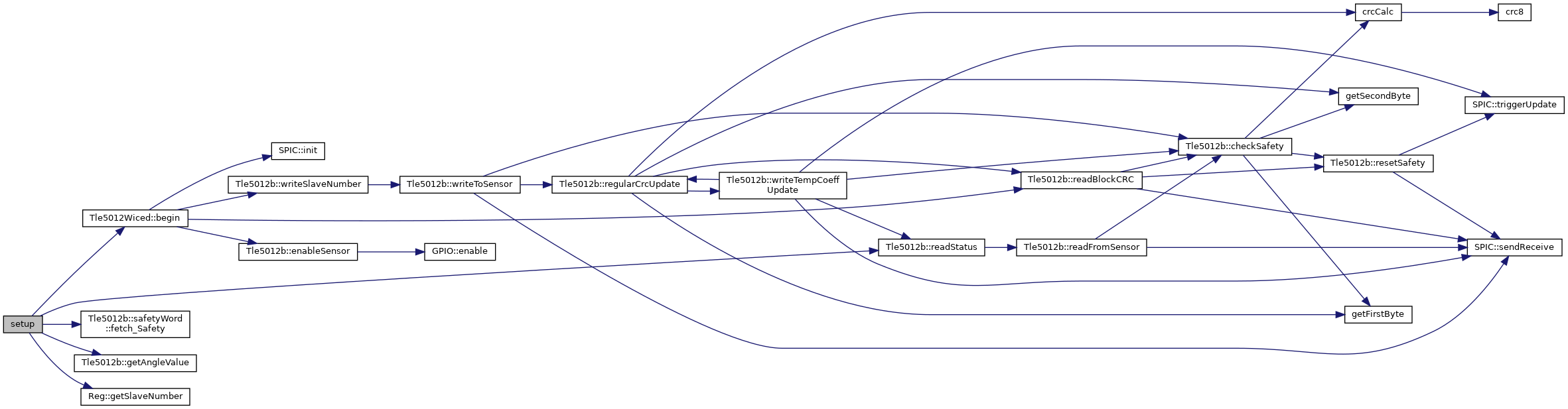
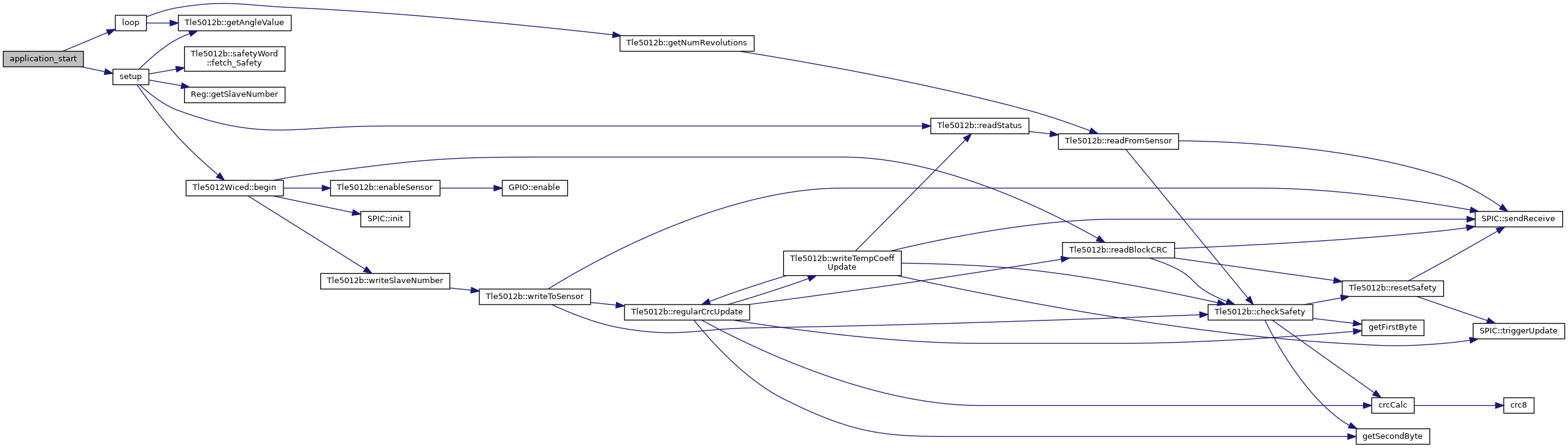
Testscript for using up to four sensors on one SPI channel.
- Author
- Infineon Technologies AG
- Copyright
- 2020 Infineon Technologies AG
- Version
- 3.1.0
This example program starts one to four sensors on one SPI line with different CS pins and returns the angle value together with the safety word and the status register SNR. Due to the selected slave number the SNR will be set to 0x00, 0x01, 0x10 or 0x11. When you fetch a value from the sensor with safety word on, than the safety word register RESP will indicate the sensor who is responding. This should be the same than you have ask for. The loop function will than print out the individual sensor(s) angle values.
This example also demonstrates how to handle more than on sensor in an array setup.
SPDX-License-Identifier: MIT
|