|
radar-bgt60 1.1.1
C++ library for the BGT60LTR11AIP - XENSIV™ 60 Ghz Radar from Infineon
|

|
|
radar-bgt60 1.1.1
C++ library for the BGT60LTR11AIP - XENSIV™ 60 Ghz Radar from Infineon
|
|
Data Structures | |
| class | GPIOIno |
| class | TimerIno |
| class GPIOIno |


Public Types | |
Interrupt event | |
| enum | IntEvent_t { INT_FALLING_EDGE = 0 , INT_RISING_EDGE = 1 , INT_HIGH = 2 , INT_LOW = 3 , INT_CHANGE = 4 } |
Voltage level | |
| enum | VLevel_t { GPIO_LOW = 0 , GPIO_HIGH = 1 } |
Voltage logic | |
| enum | VLogic_t { NEGATIVE = 1 , POSITIVE = 2 } |
Public Member Functions | |
| GPIOIno () | |
| Constructor of the Arduino GPIO class. | |
| GPIOIno (uint8_t pin, uint8_t mode, VLogic_t logic) | |
| Constructor of the Arduino GPIO class. | |
| ~GPIOIno () | |
| Error_t | init () |
| Initialize the GPIO. | |
| Error_t | deinit () |
| Deinitialize the GPIO. | |
| VLevel_t | read () |
| Read GPIO logic level. | |
| Error_t | write (VLevel_t level) |
| Set GPIO logic level. | |
| Error_t | enable () |
| Enable the GPIO. | |
| Error_t | disable () |
| Disable the GPIO. | |
| Error_t | enableInt (void(*cback)(void), IntEvent_t mode) |
| Enables the Arduino GPIO interrupt. | |
| Error_t | disableInt () |
| Disables the Arduino GPIO interrupt. | |
| IntEvent_t | intEvent () |
| Gets the latest Arduino interrupt event. | |
| GPIOIno::GPIOIno | ( | ) |
Constructor of the Arduino GPIO class.
This function is setting the basics for a GPIO.
Constructor of the Arduino GPIO class.
This function is setting the basics for a GPIO. It allows to set the pin number, mode of the pin and the logic level.
| [in] | pin | Number of the desired pin |
| [in] | mode | Defines the mode of the pin (INPUT, OUTPUT, etc.) |
| [in] | logic | Defines the logic level of the pin |
| GPIOIno::~GPIOIno | ( | ) |
|
virtual |
Initialize the GPIO.
This function is initializing the chosen pin.
| OK |
Implements bgt60::GPIO.
|
virtual |
Deinitialize the GPIO.
This function is deinitializing the chosen pin.
| OK |
Implements bgt60::GPIO.
|
virtual |
Read GPIO logic level.
This function reads the logic level of the chosen pin and returns the logic level value.
| 0 | = GPIO_LOW |
| 1 | = GPIO_HIGH |
Implements bgt60::GPIO.
Set GPIO logic level.
This functions sets the logic level of the chosen pin.
| [in] | level | Desired logic level of the pin |
| OK |
Implements bgt60::GPIO.
|
virtual |
Enable the GPIO.
This functions enable the chosen pin. Depending on the chosen logic of the pin it sets the right logic level of the pin.
| OK |
Implements bgt60::GPIO.
|
virtual |
Disable the GPIO.
This functions disables the chosen pin. Depending on the chosen logic of the pin it sets the right logic level of the pin.
| OK |
Implements bgt60::GPIO.
|
virtual |
Enables the Arduino GPIO interrupt.
This function enables the interrupt on chosen pin. Depending on the mode, it triggers the interrupt.
| [in] | *cback | Function pointer of the interrupt callback |
| [in] | mode | Event at which the interrupt will occur |
| OK |
Implements bgt60::GPIO.
|
virtual |
Disables the Arduino GPIO interrupt.
This function disables the interrupt on chosen pin.
| OK |
Implements bgt60::GPIO.
|
inlinevirtual |
Gets the latest Arduino interrupt event.
This function gets the latest interrupt event on the earlier configured GPIO pin.
| INT_FALLING_EDGE | if falling edge event |
| INT_RISING_EDGE | if rising edge event |
Implements bgt60::GPIO.
| class TimerIno |
Public Member Functions | |
| TimerIno () | |
| Timer Ino constructor. | |
| ~TimerIno () | |
| Timer Ino destructor. | |
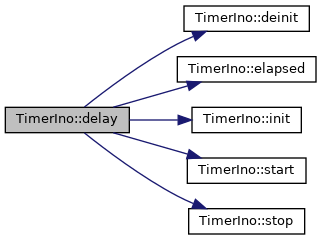
| Error_t | init () |
| Initialiazes the Arduino timer. | |
| Error_t | deinit () |
| Deinitialiazes the Arduino timer. | |
| Error_t | start () |
| Starts the Arduino timer. | |
| Error_t | elapsed (uint32_t &elapsed) |
| Elapsed time since the timer was started. | |
| Error_t | elapsedMicro (uint32_t &elapsed) |
| Elapsed time since the timer was started in microseconds. | |
| Error_t | stop () |
| Stops the Arduino timer. | |
| Error_t | delay (const uint32_t timeout) |
| Introduces a delay during the specified time. | |
| TimerIno::TimerIno | ( | ) |
Timer Ino constructor.
| TimerIno::~TimerIno | ( | ) |
Timer Ino destructor.
|
inlinevirtual |
|
inlinevirtual |
|
inlinevirtual |
Elapsed time since the timer was started.
| [out] | elapsed | Time in milliseconds |
| OK |
Implements bgt60::Timer.

Elapsed time since the timer was started in microseconds.
| [out] | elapsed | Time in microseconds |
| OK |
Implements bgt60::Timer.

|
inlinevirtual |
Introduces a delay during the specified time.
| [in] | timeout | Delay time in milliseconds |
| OK |
Implements bgt60::Timer.