|
PAS CO2 Sensor
1.0.3
C++ library for Infineon Photoacoustic Spectroscopy (PAS) XENSIV™ CO2 miniaturized sensor
|


|
|
PAS CO2 Sensor
1.0.3
C++ library for Infineon Photoacoustic Spectroscopy (PAS) XENSIV™ CO2 miniaturized sensor
|
|
#include <pas-co2-pulse-ino.hpp>
Public Member Functions | |
| PASCO2PulseIno (uint8_t pwmPin, uint8_t intPin=GPIOIno::unusedPin, uint8_t power3V3Pin=GPIOIno::unusedPin, uint8_t power12VPin=GPIOIno::unusedPin, uint8_t pwmSelPin=GPIOIno::unusedPin) | |
| PAS CO2 Pulse Arduino Constructor. More... | |
| ~PASCO2PulseIno () | |
| PAS CO2 Pulse Arduino Destructor. More... | |
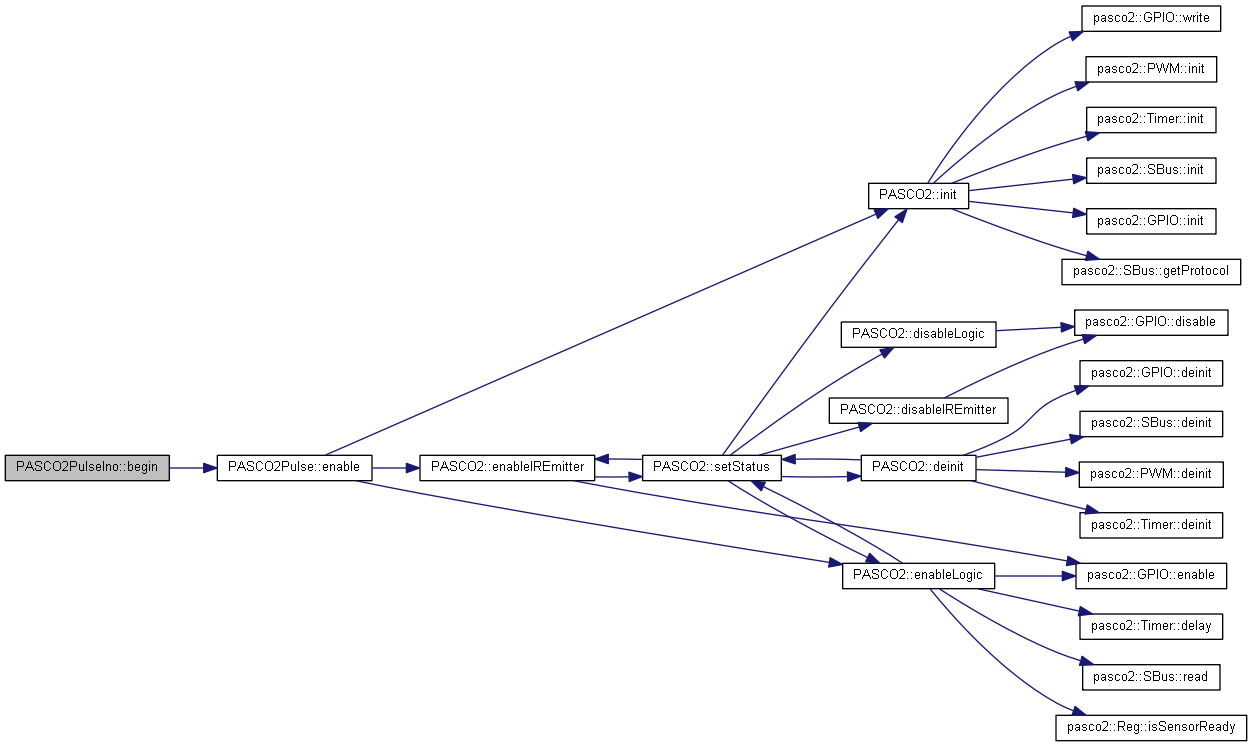
| Error_t | begin () |
| Begins the sensor. More... | |
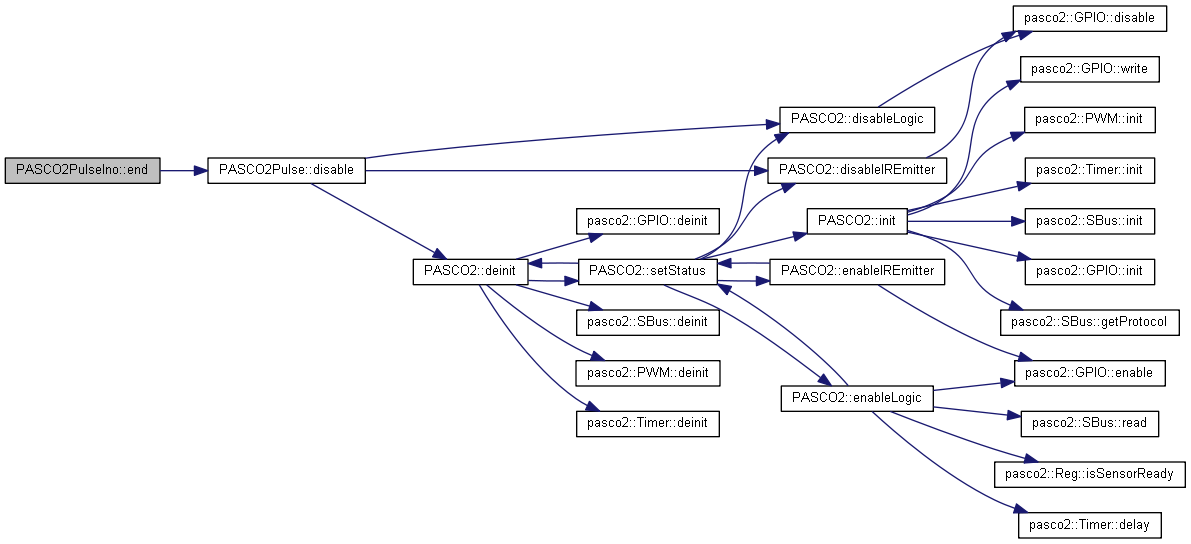
| Error_t | end () |
| Ends the sensor. More... | |
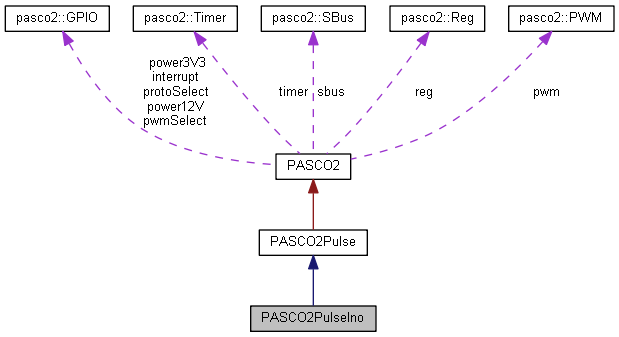
 Public Member Functions inherited from PASCO2Pulse Public Member Functions inherited from PASCO2Pulse | |
| PASCO2Pulse (PWM *const pwm, Timer *const timer=nullptr, pasco2::GPIO *const interrupt=nullptr, pasco2::GPIO *const power3V3=nullptr, pasco2::GPIO *const power12V=nullptr, pasco2::GPIO *const pwmSelect=nullptr) | |
| PAS CO2 Pulse Constructor. More... | |
| virtual | ~PASCO2Pulse () |
| PAS CO2 Pulse Destructor. More... | |
| Error_t | enable () |
| Enables the sensor. More... | |
| Error_t | disable () |
| Disables the sensor. More... | |
| Error_t | startMeasure (void(*cback)(void *)=nullptr) |
| Triggers the internal measuring of the sensor. More... | |
| Error_t | stopMeasure () |
| Stops the internal measuring of the sensor. More... | |
| Error_t | getCO2 (int16_t &co2ppm) |
| Gets the CO2 concentration measured. More... | |
| Error_t | reset () |
| Resets the sensor. More... | |
| PASCO2PulseIno::PASCO2PulseIno | ( | uint8_t | pwmPin, |
| uint8_t | intPin = GPIOIno::unusedPin, |
||
| uint8_t | power3V3Pin = GPIOIno::unusedPin, |
||
| uint8_t | power12VPin = GPIOIno::unusedPin, |
||
| uint8_t | pwmSelPin = GPIOIno::unusedPin |
||
| ) |
PAS CO2 Pulse Arduino Constructor.
Mandatory arguments:
Optional arguments:
Most of the GPIO will be fixed by hardware. In particular those enabling the sensor main power and the emitter power. They are part of the sensor library to provide potential absolute control by software. The hardware interface and its features, are also provided in the library. But it can be as well handled externally
| [in] | pwmPin | PWM pin. |
| [in] | intPin | Interrupt pin. Default is UnusedPin |
| [in] | power3V3Pin | Power 3V3 pin. Default is UnusedPin |
| [in] | power12VPin | Power 12V pin. Default is UnusedPin |
| [in] | pwmSelPin | PWM select pin. Default is UnusedPin |
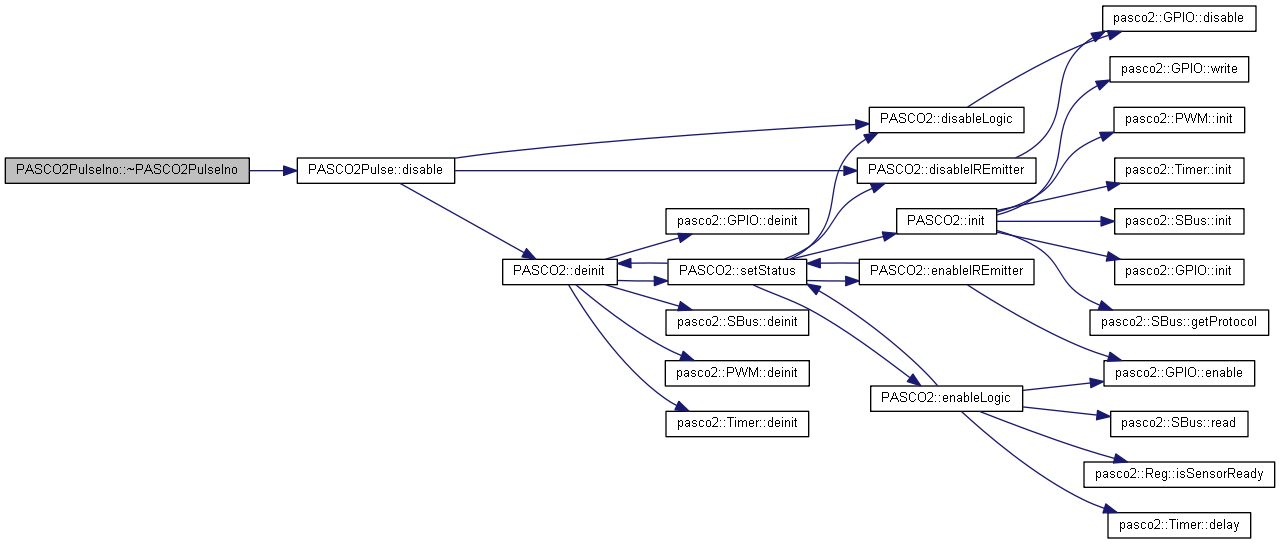
| PASCO2PulseIno::~PASCO2PulseIno | ( | ) |
PAS CO2 Pulse Arduino Destructor.
It disables the sensor and deletes all the dynamically created PAL instances in the constructor
|
inline |
Begins the sensor.
| OK | if success |
| INTF_ERROR | if interface error |
| IC_POWERON_ERROR | if power-on error |
|
inline |
Ends the sensor.
| OK | if success |
| INTF_ERROR | if interface error |
 1.8.15
1.8.15