|
Hall Switch 2.1.0
C++ library of Infineon single Hall-effect switch family for magnetic sensing applications
|

|
|
Hall Switch 2.1.0
C++ library of Infineon single Hall-effect switch family for magnetic sensing applications
|
|
#include <hall-speed-ino.hpp>
Public Member Functions | |
| HallSpeedIno (uint8_t outputPin, uint8_t polesNum=1, HallSpeed::SpeedUnit_t units=HallSpeed::HERTZ, HallSpeed::CBackSpd_t cBack=NULL, uint8_t powerPin=UNUSED_PIN) | |
| Hall Speed Ino Constructor. | |
| HallSpeedIno (PlatformIno_t hwPlatf, uint8_t polesNum=1, HallSpeed::SpeedUnit_t units=HallSpeed::HERTZ, HallSpeed::CBackSpd_t cBack=NULL) | |
| Hall Speed Ino Constructor with predefined Arduino hardware platform. | |
| ~HallSpeedIno () | |
| Hall Speed Ino Destructor | |
| int | begin () |
| Begins the speed sensor. | |
| int | end () |
| Ends the speed sensor. | |
| double | getSpeed () |
| Gets the speed value. | |
| HallSpeedIno::HallSpeedIno | ( | uint8_t | outputPin, |
| uint8_t | polesNum = 1, |
||
| HallSpeed::SpeedUnit_t | units = HallSpeed::HERTZ, |
||
| HallSpeed::CBackSpd_t | cBack = NULL, |
||
| uint8_t | powerPin = UNUSED_PIN |
||
| ) |
Hall Speed Ino Constructor.
Mandatory arguments:
Optional arguments:
| [in] | outputPin | Sensor output pin |
| [in] | polesMum | Number of magnetic poles pair of the rotating B field |
| [in] | units | Speed units (RPM, Hertz, cps ...) |
| [in] | cBack | Callback for interrupt mode. When passed, it enables interrupt mode |
| [in] | powerPin | Hall speed power pin. When passed, enabled the sensor switch controlled mode |
| HallSpeedIno::HallSpeedIno | ( | PlatformIno_t | hwPlatf, |
| uint8_t | polesNum = 1, |
||
| HallSpeed::SpeedUnit_t | units = HallSpeed::HERTZ, |
||
| HallSpeed::CBackSpd_t | cBack = NULL |
||
| ) |
Hall Speed Ino Constructor with predefined Arduino hardware platform.
Mandatory arguments:
Optional arguments:
| [in] | hwPlatf | Predefined Arduino hardware platform |
| [in] | polesMum | Number of magnetic poles pair of the rotating B field |
| [in] | units | Speed units (RPM, Hertz, cps ...) |
| [in] | cBack | Callback for interrupt mode. When passed, it enables interrupt mode |
| HallSpeedIno::~HallSpeedIno | ( | ) |
Hall Speed Ino Destructor

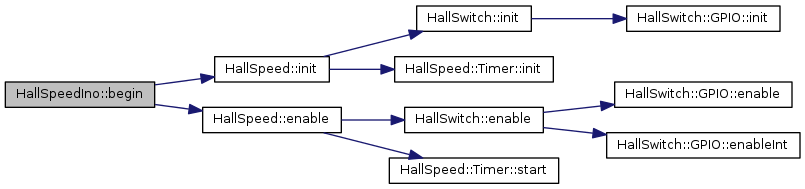
| int HallSpeedIno::begin | ( | ) |
Begins the speed sensor.
| 0 | if OK |
| -1 | if error |
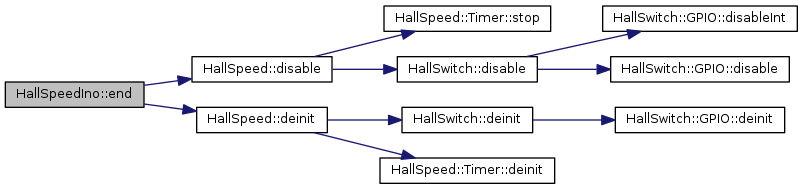
| int HallSpeedIno::end | ( | ) |
Ends the speed sensor.
| 0 | if OK |
| -1 | if error |
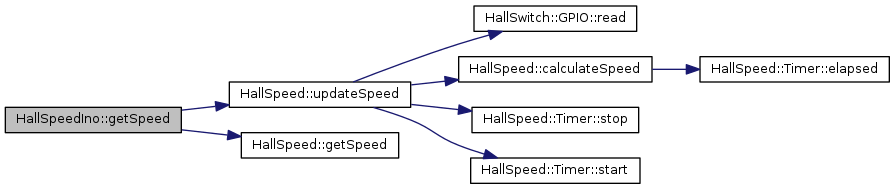
| double HallSpeedIno::getSpeed | ( | ) |
Gets the speed value.
| -1 | if error |