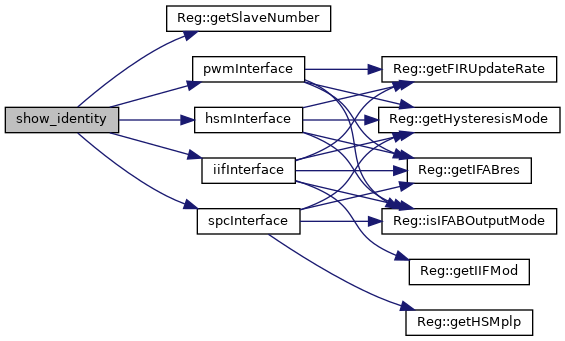
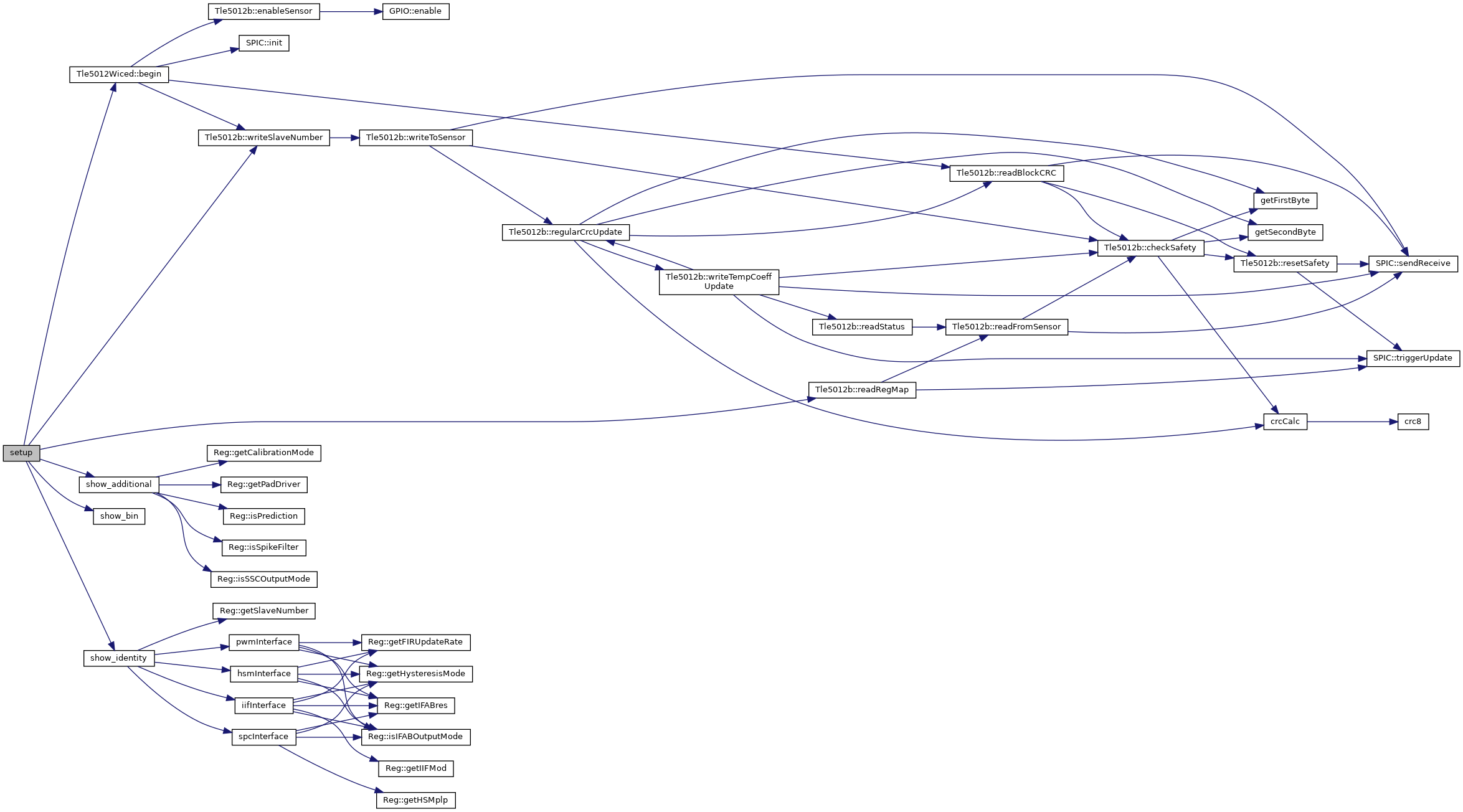
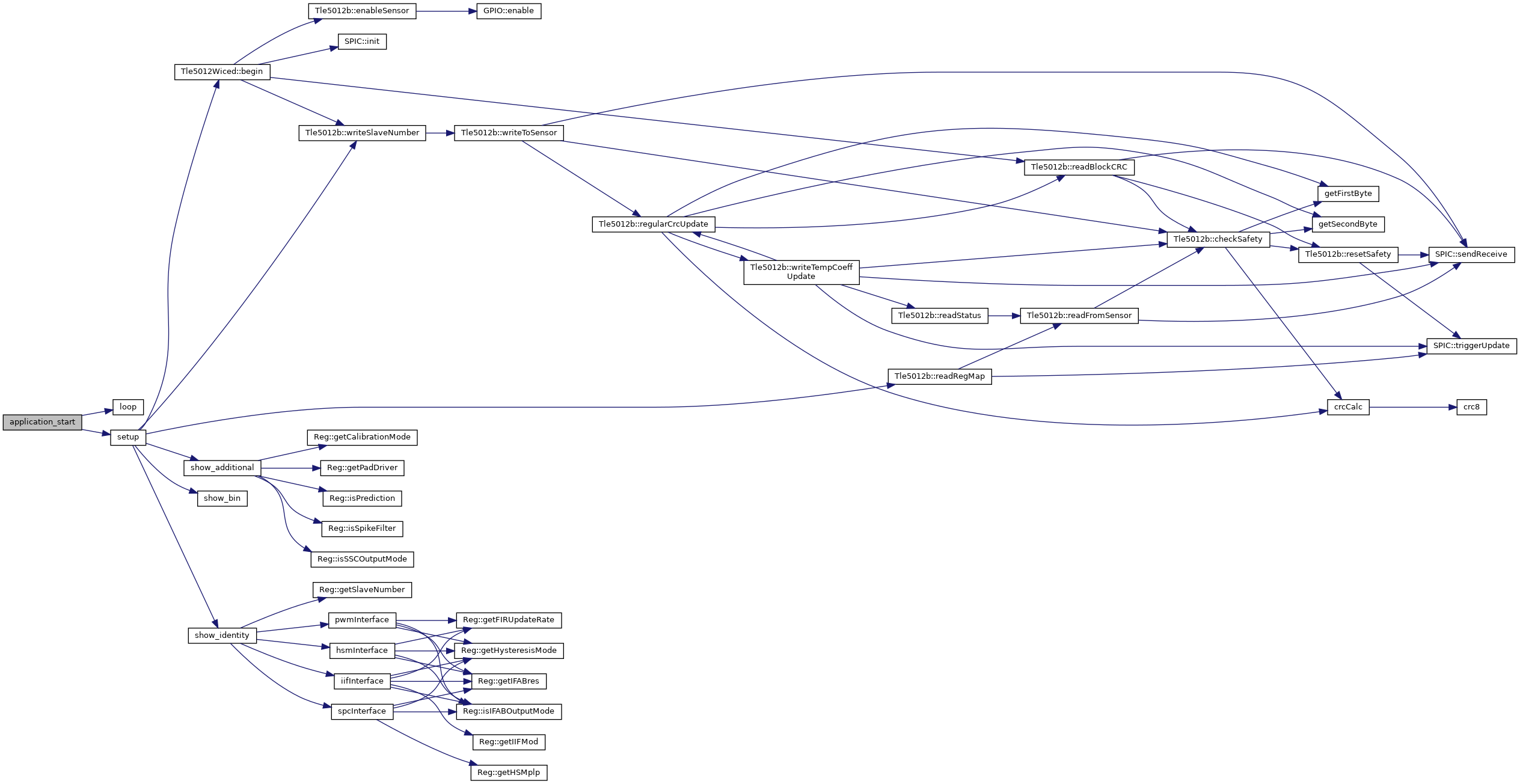
prints register bit matrix and sensor interface type
- Author
- Infineon Technologies AG (Dr.Olaf Filies)
- Copyright
- 2020 Infineon Technologies AG
- Version
- 3.1.0
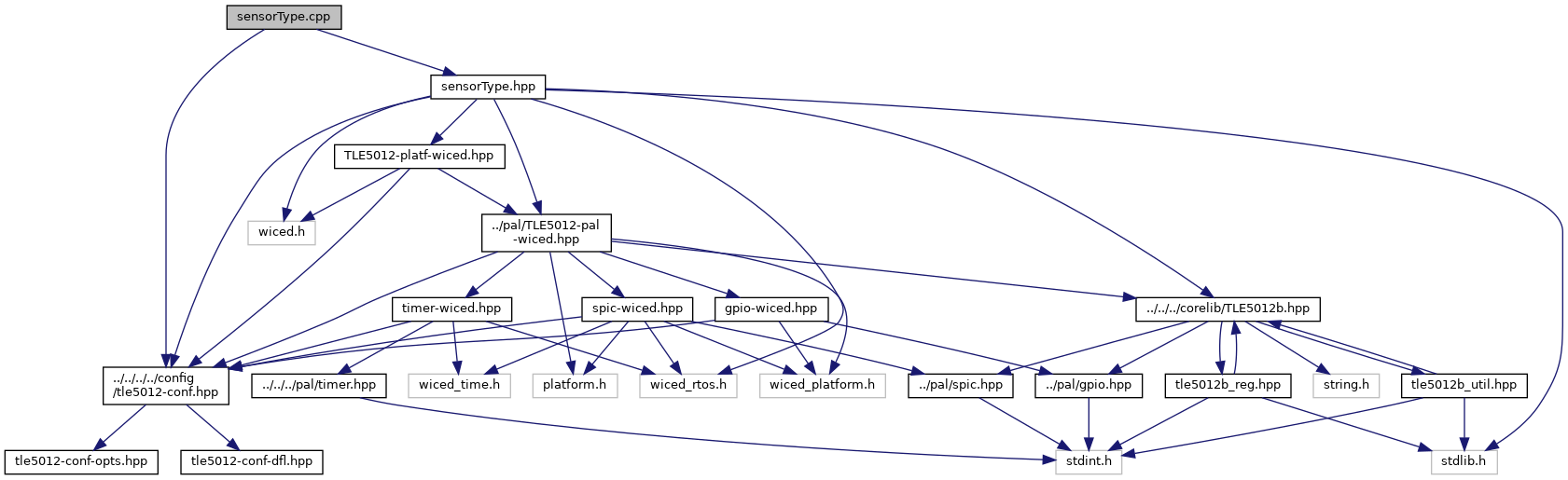
This example program prints the bit matrix of all registers and the sensors default interface type and its settings. From special registers MOD1,2,3,4 and IFAB the explicit sensor interface set and the PCB board will be identified. See the Sensor manual for further information on the different interfaces and the different sensor boards.
- Attention
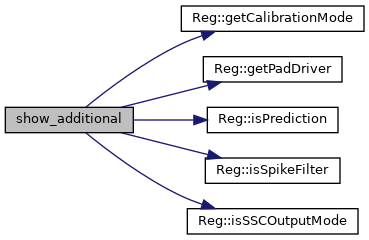
- Additional by removing the remarks on certain write functions, some sensor setups can be set/unset or switched on/off.
|