|
XENSIV RADAR Presence Detection Library
|
|
XENSIV RADAR Presence Detection Library
|
This library provides an interface for human presence detection using radar.
There are a number of reasons behind the use of radar in the this application:
A typical radar system consists of the following components:
This is represented by the following figure:
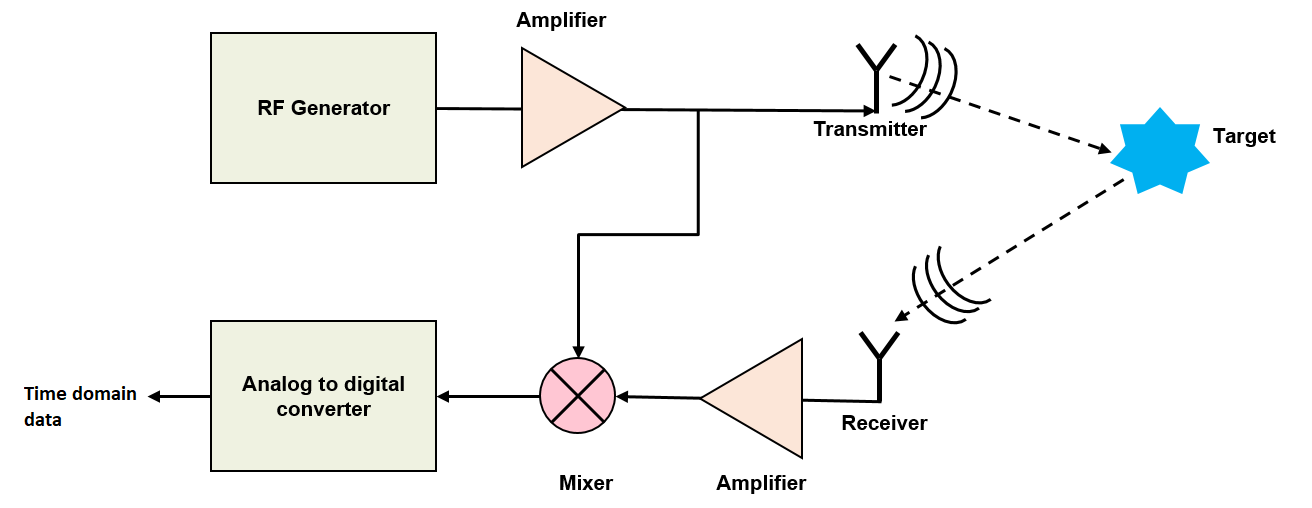
An electromagnetic wave generated by the RF generator is amplified and then transmitted through the transmitter. The wave travels at a constant speed, approximately at the speed of light and gets reflected once it strikes a target. The reflected signal is collected by the receiver, amplified and fed to a mixer where it gets mixed with the transmitted signal. The resulting signal from the mixer is called as IF (Intermediate frequency) signal, whose instantaneous frequency is equal to the difference of the instantaneous frequencies of the two input signals and phase is equal to the phase difference of the two input signals. The IF signal is digitized through an ADC, resulting in a time domain data which can then be processed further for different use cases.
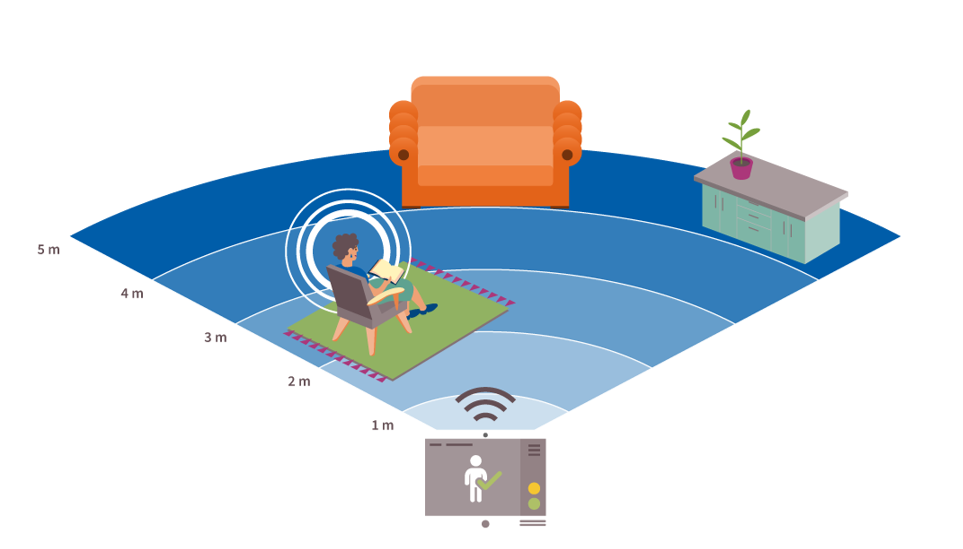
This application detects human presence within a configurable distance and a certain field of view from the radar. The maximum range to detect human presence can be configured using the library API. Presence detection can be further utilized for applications such as keyword-less authentication, automatic user interaction with smart devices and many more. The following figure shows a high-level representation of presence detection:
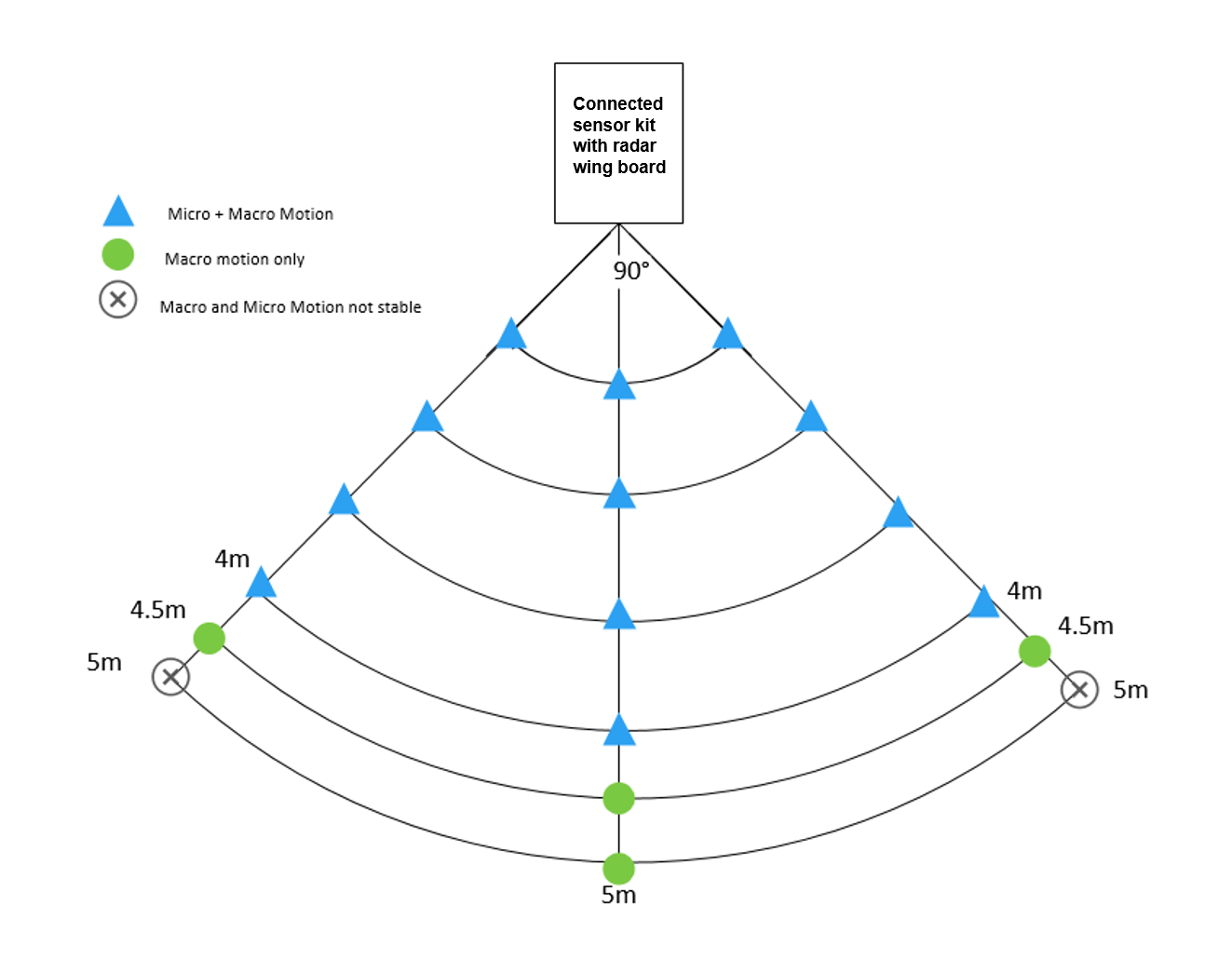
The connected sensor kit with the Radar Wing Board can be mounted anywhere on the wall in front facing orientation at 1-1.5 meters height from the ground level. The following figure provides an illustration of radar coverage for macro and micro movements.
The presence detection library detects macro and micro movements. The macro then micro detection mode could be illustrated using a state machine
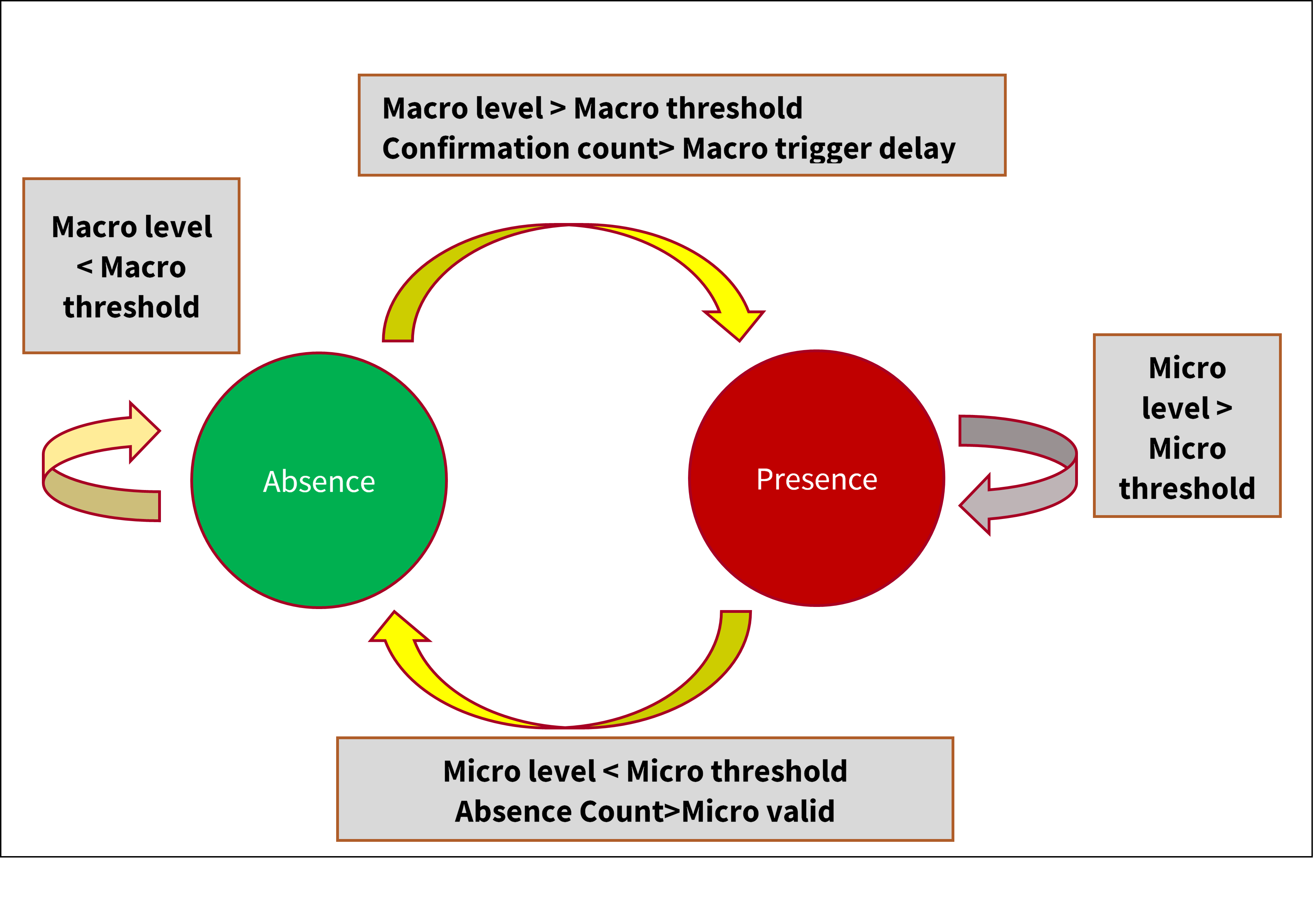
When the detection is in absence state, it would check the macro level. If macro level is higher than macro threshold, macro trigger confirmation count will increase by 1. If confirmation count exceeds macro trigger delay, state would transit from absence to presence. For presence state, state remains in presence when micro level is higher than the micro threshold. When the micro level is lower than the micro threshold, absence count will increase by 1. If absence count exceeds micro valid, the state would go back to absence.
The user can configure:
Code size (Bytes) : 10506
RAM size (Bytes) : 86404
The following snippet shows a task that allocates and initializes an instance of the radar presence detection algorithm using xensiv_radar_presence_alloc.
Next, the user event callback handler is configured using xensiv_radar_presence_set_callback.
Finally, it waits in idle mode until new raw radar data is available and feeds it to the algorithm using xensiv_radar_presence_process_frame.
Data Structures | |
| struct | xensiv_radar_presence_event_t |
| XENSIV(TM) Radar Presence detection algorithm event. More... | |
| struct | xensiv_radar_presence_config_t |
| XENSIV(TM) Radar Presence detection algorithm configuration. More... | |
Macros | |
| #define | XENSIV_RADAR_PRESENCE_OK (0) |
| Result code indicating successful operation. More... | |
| #define | XENSIV_RADAR_PRESENCE_FFT_LEN_ERROR (1) |
| Result code indicating a not supported configuration. More... | |
| #define | XENSIV_RADAR_PRESENCE_MEM_ERROR (2) |
| Result code indicating a memory allocation error. More... | |
| #define | XENSIV_RADAR_PRESENCE_TIMESTAMP uint32_t |
| Type definition for timestamp. More... | |
Typedefs | |
| typedef void(* | xensiv_radar_presence_cb_t) (xensiv_radar_presence_handle_t handle, const xensiv_radar_presence_event_t *event, void *data) |
| XENSIV(TM) Radar Presence detection callback to notify user about presence events. | |
Enumerations | |
| enum | xensiv_radar_presence_state_t { XENSIV_RADAR_PRESENCE_STATE_MACRO_PRESENCE, XENSIV_RADAR_PRESENCE_STATE_MICRO_PRESENCE, XENSIV_RADAR_PRESENCE_STATE_ABSENCE } |
| XENSIV(TM) Radar Presence detection algorithm state. More... | |
| enum | xensiv_radar_presence_mode_t { XENSIV_RADAR_PRESENCE_MODE_MACRO_ONLY, XENSIV_RADAR_PRESENCE_MODE_MICRO_ONLY, XENSIV_RADAR_PRESENCE_MODE_MICRO_IF_MACRO, XENSIV_RADAR_PRESENCE_MODE_MICRO_AND_MACRO } |
| XENSIV(TM) Radar Presence detection algorithm mode. More... | |
Functions | |
| void | xensiv_radar_presence_set_malloc_free (void *(*malloc_func)(size_t size), void(*free_func)(void *ptr)) |
| Assigns malloc and free functions for malloc_fptr and free_fptr variable. More... | |
| void | xensiv_radar_presence_set_callback (xensiv_radar_presence_handle_t handle, xensiv_radar_presence_cb_t callback, void *data) |
| Assigns callback function for presence context. More... | |
| void | xensiv_radar_presence_init_config (xensiv_radar_presence_config_t *config) |
| Initialize XENSIV(TM) Initializes Radar Presence detection algorithm configuration structure with defaults settings: More... | |
| int32_t | xensiv_radar_presence_alloc (xensiv_radar_presence_handle_t *handle, const xensiv_radar_presence_config_t *config) |
| Allocate XENSIV(TM) Radar Presence detection algorithm context. More... | |
| int32_t | xensiv_radar_presence_get_config (const xensiv_radar_presence_handle_t handle, xensiv_radar_presence_config_t *config) |
| Obtains current presence detection algorithm configuration. More... | |
| int32_t | xensiv_radar_presence_set_config (xensiv_radar_presence_handle_t handle, const xensiv_radar_presence_config_t *config) |
| Sets presence detection algorithm configuration. More... | |
| int32_t | xensiv_radar_presence_process_frame (xensiv_radar_presence_handle_t handle, float32_t *frame, XENSIV_RADAR_PRESENCE_TIMESTAMP time_ms) |
| Process one radar frame. More... | |
| cfloat32_t * | xensiv_radar_presence_get_macro_fft_buffer (const xensiv_radar_presence_handle_t handle) |
| Returns macro fft buffer from presence context. More... | |
| bool | xensiv_radar_presence_get_max_macro (const xensiv_radar_presence_handle_t handle, float *macro, int *index) |
| Return last maximum detected energy of macro movement against set threshold. More... | |
| bool | xensiv_radar_presence_get_max_micro (const xensiv_radar_presence_handle_t handle, float *micro, int *index) |
| Return last maximum detected energy of micro movement against set threshold. More... | |
| float32_t | xensiv_radar_presence_get_bin_length (const xensiv_radar_presence_handle_t handle) |
| Return bin length in meters. More... | |
| void | xensiv_radar_presence_reset (xensiv_radar_presence_handle_t handle) |
| Resets the presence algorithm. More... | |
| void | xensiv_radar_presence_free (xensiv_radar_presence_handle_t handle) |
| Frees up resources allocated during initialization. More... | |
| struct xensiv_radar_presence_event_t |
| Data Fields | ||
|---|---|---|
| XENSIV_RADAR_PRESENCE_TIMESTAMP | timestamp |
event time [ms] |
| int32_t | range_bin |
range bin index |
| xensiv_radar_presence_state_t | state |
event type xensiv_radar_presence_state_t |
| struct xensiv_radar_presence_config_t |
| Data Fields | ||
|---|---|---|
| int16_t | num_samples_per_chirp |
Number of samples per chirp. |
| int16_t | micro_fft_size |
slow time FFT, e.g. number of chirps accumulated before calculating micro movement FFT |
| float32_t | bandwidth |
FMCW Radar signal bandwidth [Hz] |
| int32_t | min_range_bin |
minimum detection range bin |
| int32_t | max_range_bin |
maximum detection range bin |
| float32_t | macro_threshold |
Threshold value used in macro movement detection |
| float32_t | micro_threshold |
Threshold value used in micro movement detection |
| XENSIV_RADAR_PRESENCE_TIMESTAMP | macro_compare_interval_ms |
macro compare interval |
| int32_t | macro_movement_confirmations |
trigger delay for macro movement detection. Input value is multiple of macro_compare_interval_ms. For example, if macro_compare_interval_ms is 250 and setting macro_movement_confirmations is 3, the algorithm will determine the motion as macro movement for a continuous 750ms of major motion |
| int32_t | macro_trigger_range |
macro trigger range for macro movement detection. At least that many range bins need to be triggered, so that a presence is reported. Default is 1. |
| XENSIV_RADAR_PRESENCE_TIMESTAMP | macro_movement_validity_ms |
Time-out value [ms] used to judge motion is no longer macro movement. For example, if the value is 1000, it means a detected value below the macro threshold for 1 second continuous would be treated as no macro movement |
| XENSIV_RADAR_PRESENCE_TIMESTAMP | micro_movement_validity_ms |
Time-out value [ms] used to judge the motion is no longer micro movement. The judging criteria are the same as for a valid macro value. |
| xensiv_radar_presence_mode_t | mode |
Sets the presence detection detect mode xensiv_radar_presence_mode_t. |
| bool | macro_fft_bandpass_filter_enabled |
Enable/disable vibration filter |
| bool | micro_fft_decimation_enabled |
Enable/disable micro FFT low pass filter |
| int32_t | micro_movement_compare_idx | |
| #define XENSIV_RADAR_PRESENCE_OK (0) |
Result code indicating successful operation.
| #define XENSIV_RADAR_PRESENCE_FFT_LEN_ERROR (1) |
Result code indicating a not supported configuration.
| #define XENSIV_RADAR_PRESENCE_MEM_ERROR (2) |
Result code indicating a memory allocation error.
| #define XENSIV_RADAR_PRESENCE_TIMESTAMP uint32_t |
Type definition for timestamp.
XENSIV(TM) Radar Presence detection algorithm mode.
| void xensiv_radar_presence_set_malloc_free | ( | void *(*)(size_t size) | malloc_func, |
| void(*)(void *ptr) | free_func | ||
| ) |
Assigns malloc and free functions for malloc_fptr and free_fptr variable.
| [in] | malloc_func | Pointer to a function that is used for allocating memory |
| [in] | free_func | Pointer to a function that is used for freeing memory |
| void xensiv_radar_presence_set_callback | ( | xensiv_radar_presence_handle_t | handle, |
| xensiv_radar_presence_cb_t | callback, | ||
| void * | data | ||
| ) |
Assigns callback function for presence context.
| [in] | handle | Pointer to a presence context |
| [in] | callback | Pointer to a function that will handle presence events |
| [in] | data | Data pointer that is passed to the callback |
| void xensiv_radar_presence_init_config | ( | xensiv_radar_presence_config_t * | config | ) |
Initialize XENSIV(TM) Initializes Radar Presence detection algorithm configuration structure with defaults settings:
| [in] | config | Pointer to a variable that holds the configuration |
| int32_t xensiv_radar_presence_alloc | ( | xensiv_radar_presence_handle_t * | handle, |
| const xensiv_radar_presence_config_t * | config | ||
| ) |
Allocate XENSIV(TM) Radar Presence detection algorithm context.
| [out] | handle | Pointer to a handle that holds the computation context |
| [in] | config | Pointer to a variable that holds the configuration |
| int32_t xensiv_radar_presence_get_config | ( | const xensiv_radar_presence_handle_t | handle, |
| xensiv_radar_presence_config_t * | config | ||
| ) |
Obtains current presence detection algorithm configuration.
| [in] | handle | Handle that holds the computation context |
| [out] | config | Pointer to a variable where the configuration will be saved |
| int32_t xensiv_radar_presence_set_config | ( | xensiv_radar_presence_handle_t | handle, |
| const xensiv_radar_presence_config_t * | config | ||
| ) |
Sets presence detection algorithm configuration.
| [out] | handle | Handle that holds the computation context |
| [in] | config | Pointer to a variable that holds new configuration |
| int32_t xensiv_radar_presence_process_frame | ( | xensiv_radar_presence_handle_t | handle, |
| float32_t * | frame, | ||
| XENSIV_RADAR_PRESENCE_TIMESTAMP | time_ms | ||
| ) |
Process one radar frame.
| [in] | handle | Handle that holds the computation context |
| [in] | frame | Pointer to radar raw frame data. |
| [in] | time_ms | Current time in milliseconds |
| cfloat32_t* xensiv_radar_presence_get_macro_fft_buffer | ( | const xensiv_radar_presence_handle_t | handle | ) |
Returns macro fft buffer from presence context.
| [in] | handle | Handle that holds the computation context |
| bool xensiv_radar_presence_get_max_macro | ( | const xensiv_radar_presence_handle_t | handle, |
| float * | macro, | ||
| int * | index | ||
| ) |
Return last maximum detected energy of macro movement against set threshold.
This function can be called after processing several frames for getting the estimates of the energy amplitude with which the macro movements are detected and compared against the last set threshold. This is useful in finding the right value of the threshold for given scenarios.
| [in] | handle | Handle that holds the computation context |
| [out] | macro | Value representing amplitude of energy of the macro movement |
| [out] | index | Value representing the distance of macro movement |
| bool xensiv_radar_presence_get_max_micro | ( | const xensiv_radar_presence_handle_t | handle, |
| float * | micro, | ||
| int * | index | ||
| ) |
Return last maximum detected energy of micro movement against set threshold.
This function can be called after processing several frames for getting the estimates of the energy amplitude with which the micro movements are detected and compared against the last set threshold. This is useful in finding the right value of the threshold for given scenarios.
| [in] | handle | Handle that holds the computation context |
| [out] | micro | Value representing amplitude of energy of the micro movement |
| [out] | index | Value representing the distance of micro movement |
| float32_t xensiv_radar_presence_get_bin_length | ( | const xensiv_radar_presence_handle_t | handle | ) |
Return bin length in meters.
The length is calculated from the configured bandwidth of the radar.
| [in] | handle | Handle that holds the computation context |
| void xensiv_radar_presence_reset | ( | xensiv_radar_presence_handle_t | handle | ) |
Resets the presence algorithm.
| [in] | handle | Handle that holds the computation context |
| void xensiv_radar_presence_free | ( | xensiv_radar_presence_handle_t | handle | ) |
Frees up resources allocated during initialization.
| [in] | handle | Handle that holds the computation context |