|
Driver library to interface with XENSIV™ PAS CO2 Carbon Dioxide sensor in ModusToolbox™
|
|
Driver library to interface with XENSIV™ PAS CO2 Carbon Dioxide sensor in ModusToolbox™
|
This library provides functions for interfacing with the XENSIV™ PAS CO2 sensor.
The sensor features a small form factor with accurate and robust performance at ppm level (±30 ppm ±3% of reading). The XENSIV™ PAS CO2 sensor integrates a photo-acoustic transducer and a microcontroller which runs ppm calculations as well as compensation and configuration algorithms on the PCB.
For the hardware setup, check the "Quick start with the PSoC™ 6 Wi-Fi Bluetooth® pioneer kit" section of the Programming guide for XENSIV™ PAS CO2 sensor.
Figure 1. XENSIV™ PAS CO2 Sensor2Go kit I2C interface connection to the PSoC™ 6 Wi-Fi Bluetooth® pioneer kit

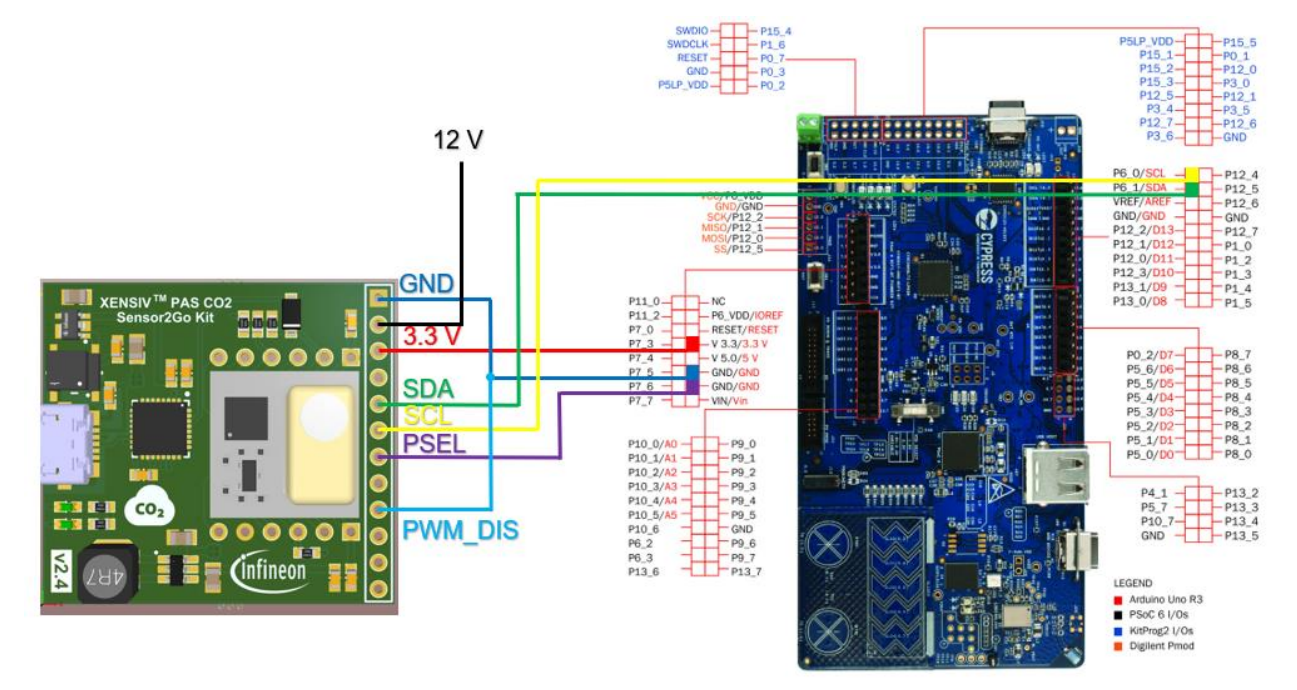
Alternatively you can use the CYSBSYSKIT-DEV-01 Rapid IoT Connect Developer Kit together with the XENSIV™ PAS CO2 Wing Board.
Do the following to create a simple application which outputs the CO2 ppm data from the sensor to the UART.
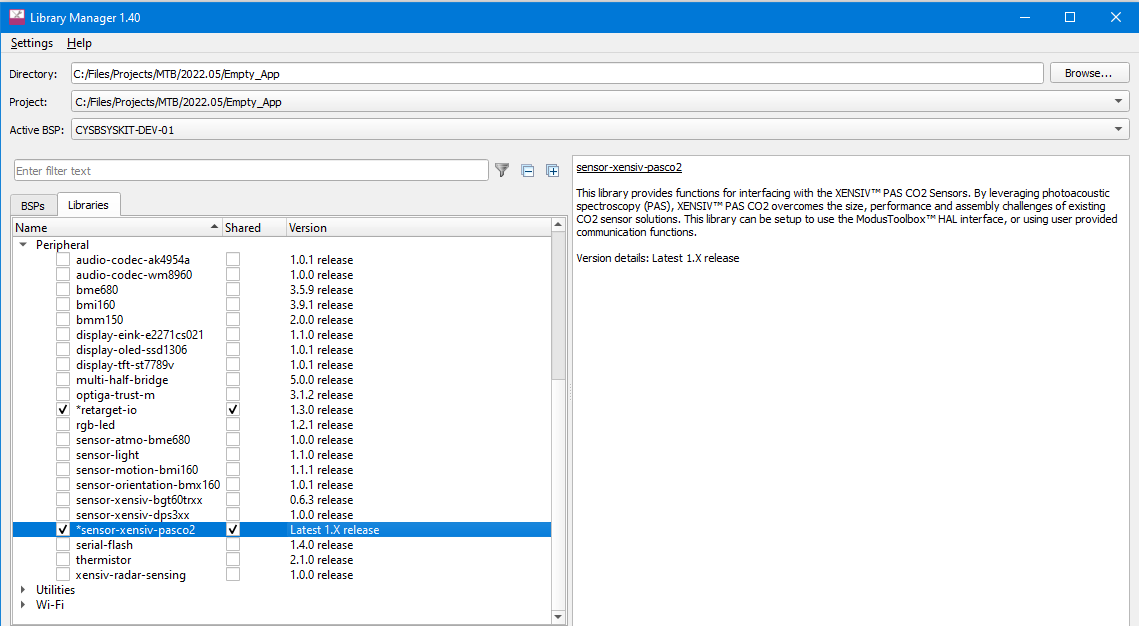
Add this library, i.e. sensor-xensiv-pasco2, to the application using the Library Manager.
Figure 2. Library Manager

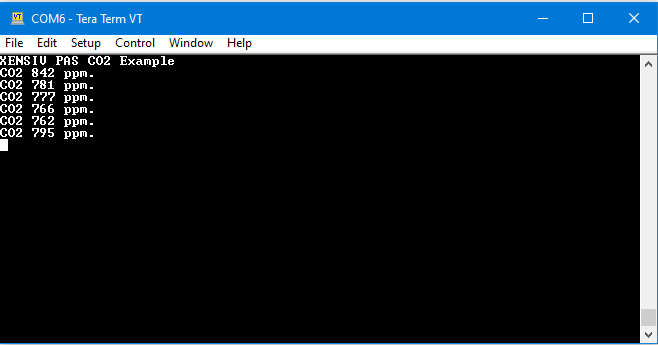
Build the application and program the kit. After programming, the application starts automatically.
Figure 3. Terminal output on program startup

The library can be used in your own platform copying following files to your project:
The library depends on platform-specific implementation of functions declared in xensiv_pasco2_platform.h:
See an implementation for the platform-specific functions in xensiv_pasco2_mtb.c using the PSoC™ 6 HAL.
© Infineon Technologies AG, 2021-2022.