|
Driver library to interface with XENSIV™ BGT60TRXXX Radar Sensors in ModusToolbox™
|
|
Driver library to interface with XENSIV™ BGT60TRXXX Radar Sensors in ModusToolbox™
|
This library provides functions for interfacing with the XENSIV™ BGT60TRxx 60 GHz FMCW Radar Sensors. This library can be set up to use the ModusToolbox™ HAL interface, or using user-provided communication functions. For more information about the XENSIV™ Radar Sensor please visit the Infineon web page on radar sensors.
The BGT60TR13C Datasheet is available as part of Radar Development Kit which can be obtained through the Infineon Developer Center.
Once the Radar Development Kit is installed using the Infineon Developer Center follow the next steps to locate the BGT60TR13C Datasheet:
For the hardware setup, see the Radar development kit user guide.
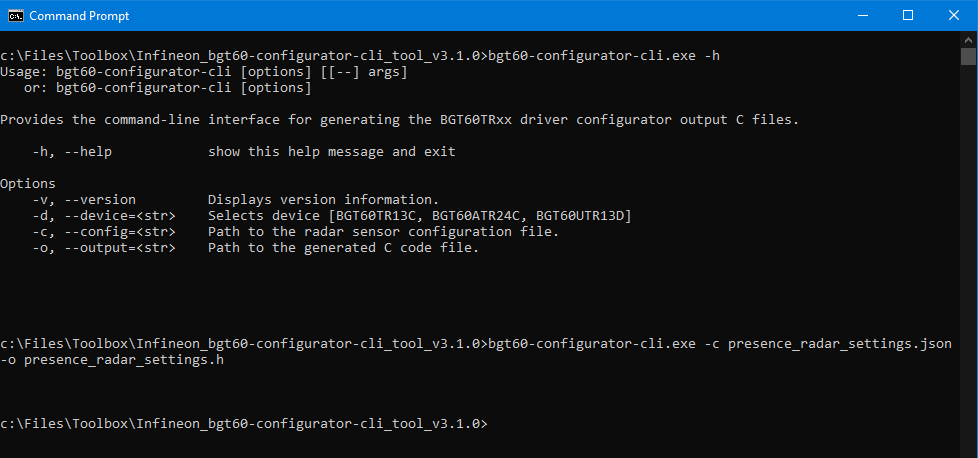
The initialization of the XENSIV™ BGT60TRxx radar sensor requires a list of registers that can be generated using the bgt60-configurator-cli tool.
The bgt60-configurator-cli is available part of Radar Development Kit which can be obtained through the Infineon Developer Center.
Once the Radar Development Kit is installed using the Infineon Developer Center follow the next steps to locate the bgt60-configurator-cli tool:
The bgt60-configurator-cli tool takes as input a configuration file in JSON format specifying the radar parameters:
{
"device_config": {
"fmcw_single_shape": {
"rx_antennas": [1],
"tx_antennas": [1],
"tx_power_level": 31,
"if_gain_dB": 60,
"lower_frequency_Hz": 61020098000,
"upper_frequency_Hz": 61479902000,
"num_chirps_per_frame": 1,
"num_samples_per_chirp": 128,
"chirp_repetition_time_s": 7e-05,
"frame_repetition_time_s": 5e-3,
"sample_rate_Hz": 2330000
}
}
}
Note: For the functionality of the following example, ADC channel 1 must be active because the data test mode works only on this channel. See the rx_antennas item in the configuration file.
Save the configuration as presence_radar_settings.json.
To generate the register file run in a command line window:
Figure 1. bgt60-configurator-cli tool
Follow the steps below to create a simple application that checks basic functionality and connectivity to the radar sensor. The application configures the sensor according to the user defined configuration, enables the sensor test pattern generator on chip for data transfer check, starts the frame generation and compares the obtained data from the radar sensor on antenna RX1 against the defined bit sequence defined by the sensor test pattern generator.
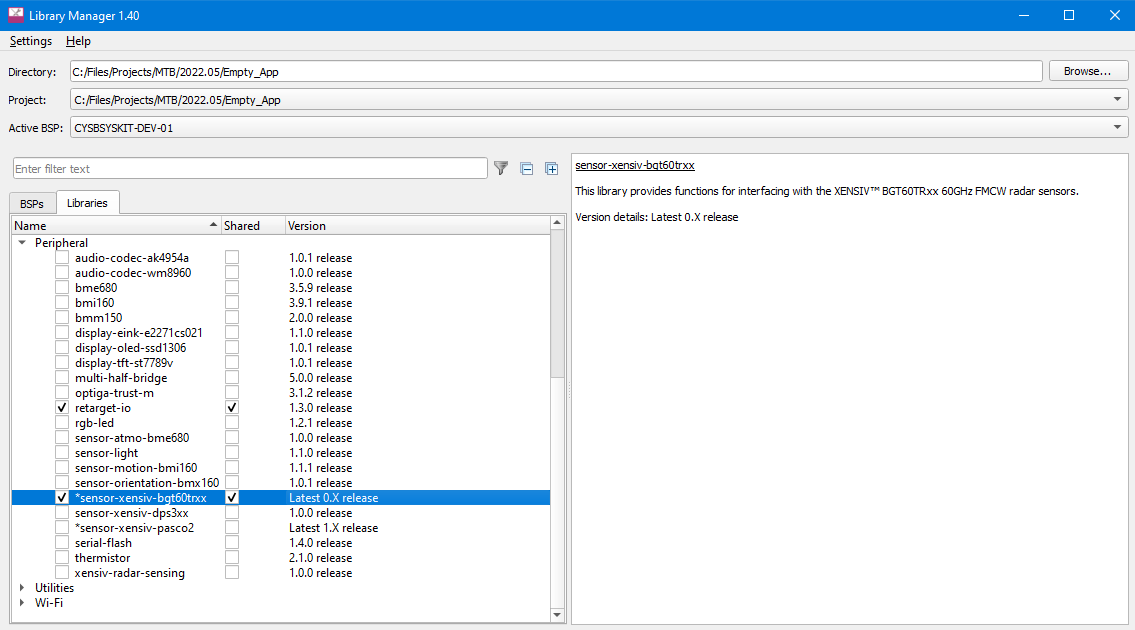
Add this library, i.e. sensor-xensiv-bgt60trxx, to the application using the Library Manager.
Figure 2. Library Manager
PIN_XENSIV_BGT60TRXX_SPI_SCLKPIN_XENSIV_BGT60TRXX_SPI_MOSIPIN_XENSIV_BGT60TRXX_SPI_MISOPIN_XENSIV_BGT60TRXX_SPI_CSNPIN_XENSIV_BGT60TRXX_IRQPIN_XENSIV_BGT60TRXX_RSTNPIN_XENSIV_BGT60TRXX_LDO_EN
Note: The pins in the code example below correspond to the ones used in CYBSYSKIT-DEV-01 kit
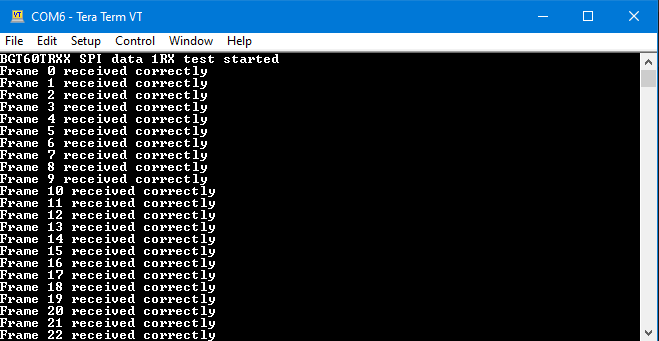
Build the application and program the kit. After programming, the application starts automatically.
Figure 3. Terminal output on program startup
The library can be used in your own platform copying the following files to your project:
The library depends on platform-specific implementation of functions declared in xensiv_bgt60trxx_platform.h:
See an example implementation for the platform-specific functions in xensiv_bgt60trxx_platform.c using the PSoC™ 6 HAL.